Overview of User interface elements in Zivid Studio
1.1 Toolbar
The Zivid Studio toolbar on the top of the interface comprises of some options to allow you to save your image, control the interface, and get information about the Zivid Studio interface being used.
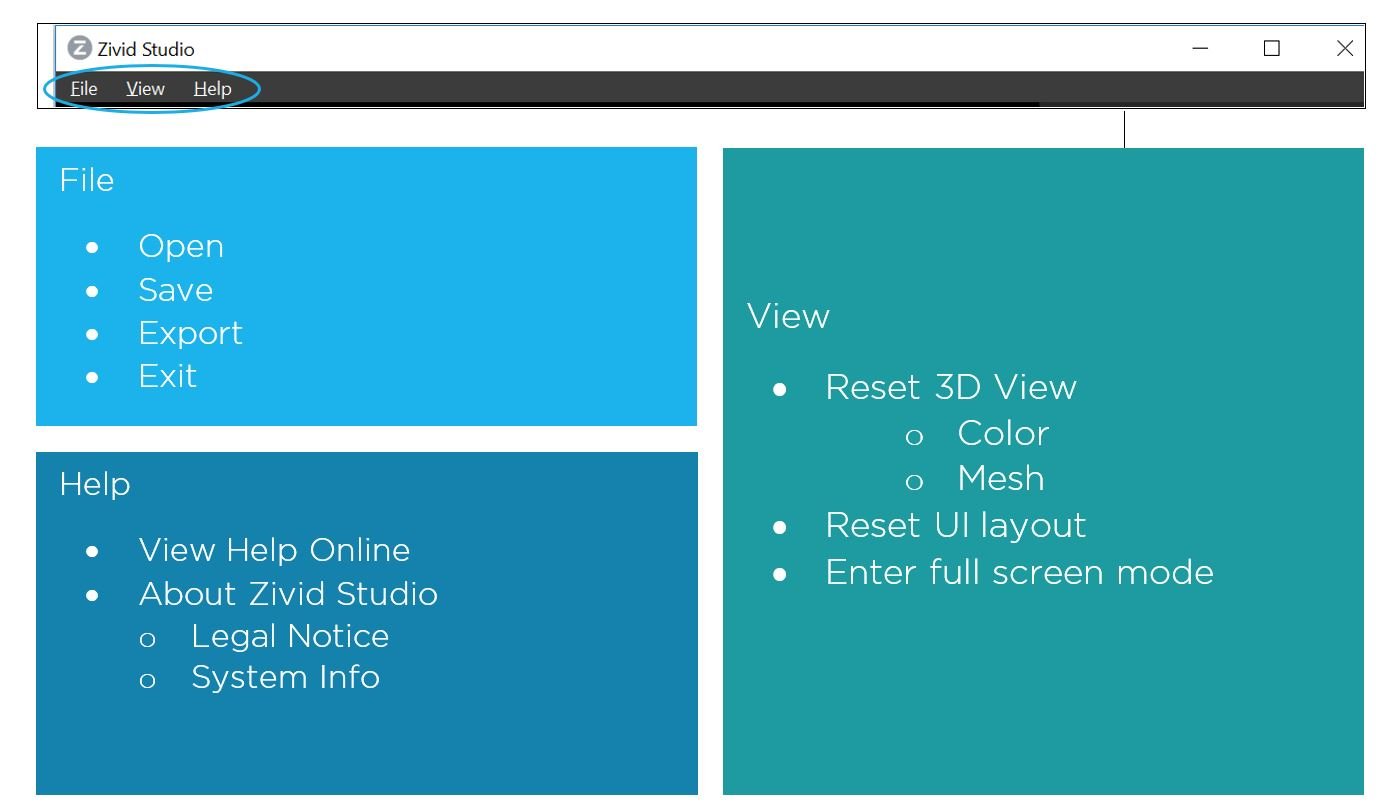
Fig.1.2 Toolbar options with Zivid Studio
|
Option
|
Function
|
|
File
|
|
| Open |
Loads a .ZDF file which is the native Zivid file format. ZDF files include the point cloud, 2D image, basic settings used to capture the point cloud and camera info |
|
Save
|
Saves the point cloud in the chosen file format. Saving as .ZDF will also store the 2D image and the depth image.
|
|
Export
|
Allows you to export the .zdf file as PLY file (*.ply as ordered or unordered)/ ASCII points file (*xyz)/ Point cloud data file (*.pcd)
|
|
Exit
|
Exits Zivid Studio
|
|
View
|
|
|
Reset 3D View
|
Resets the layout of the 3D point cloud
|
|
Color
|
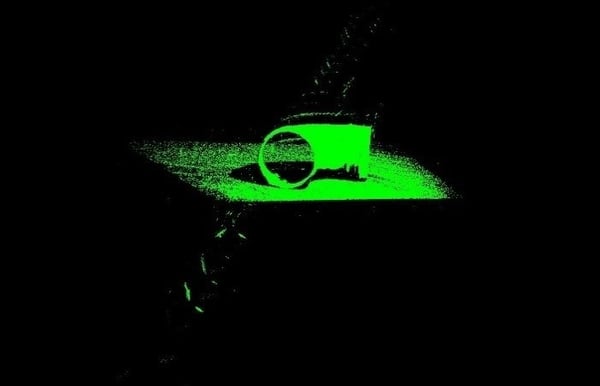
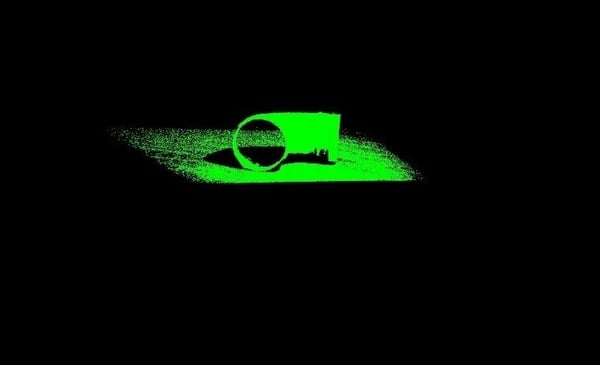
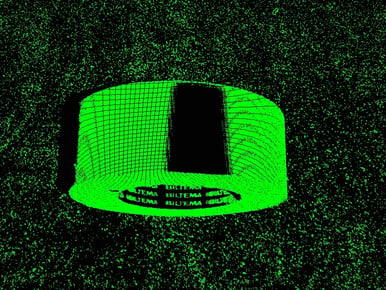
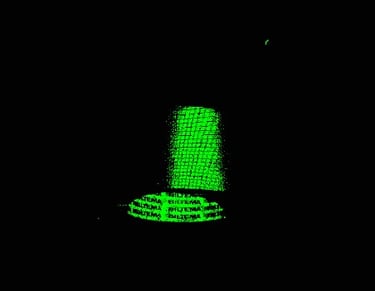
Turns the color on or off. When color is turned off, all acquired pixels in the point cloud are represented in green
|
|
Mesh
|
Creates the appearance of a mesh between all available points in the point cloud.
|
|
Reset UI layout
|
Resets the layout of the Zivid Studio window including the 3D point cloud, 2D image and depth image
|
|
Enter full screen mode
|
Toggles between full and regular screen
|
|
Help
|
|
|
View help online
|
Redirects you to the Zivid knowledge base
|
|
Legal Notice
|
Gives you detailed legal information and third-party software notices
|
Table 1.1 Zivid Studio Toolbar description
1.2 Available views
There are three available views to choose from at the bottom of the Zivid Studio interface as shown in Fig. 1.3
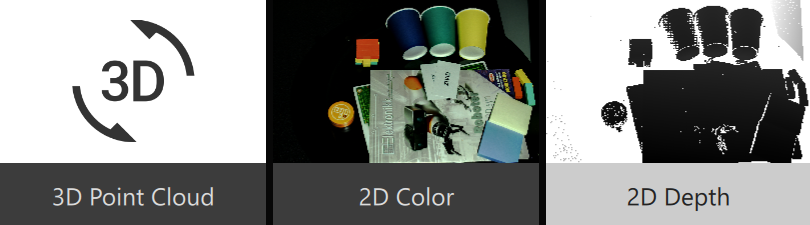
Fig.1.3 Available views
This view displays the 3D point cloud of the scene after capture, or in real time when using the live mode. This is a flexible view with zoom, pan, and rotate functionality. Use the left mouse button to rotate the point cloud and the right mouse button to pan the view. You can zoom in or out by rolling the mouse wheel, or by the middle mouse button (if available) followed by dragging the mouse.
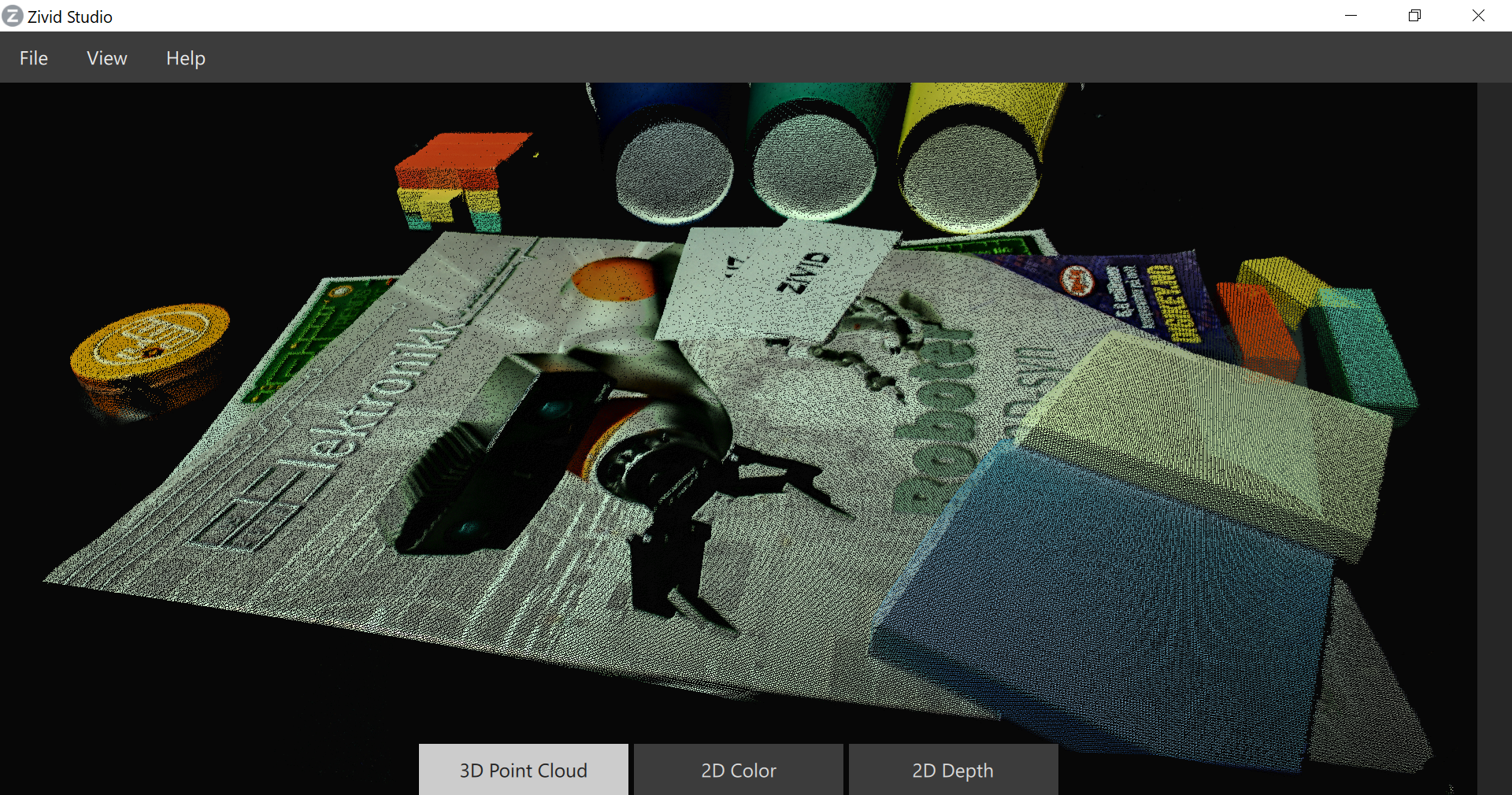
Fig.1.4 3D point cloud
You can view the 2D image by choosing the 2D color tab at the bottom. Zoom and pan functionality is available, however rotate function is not available with this view.
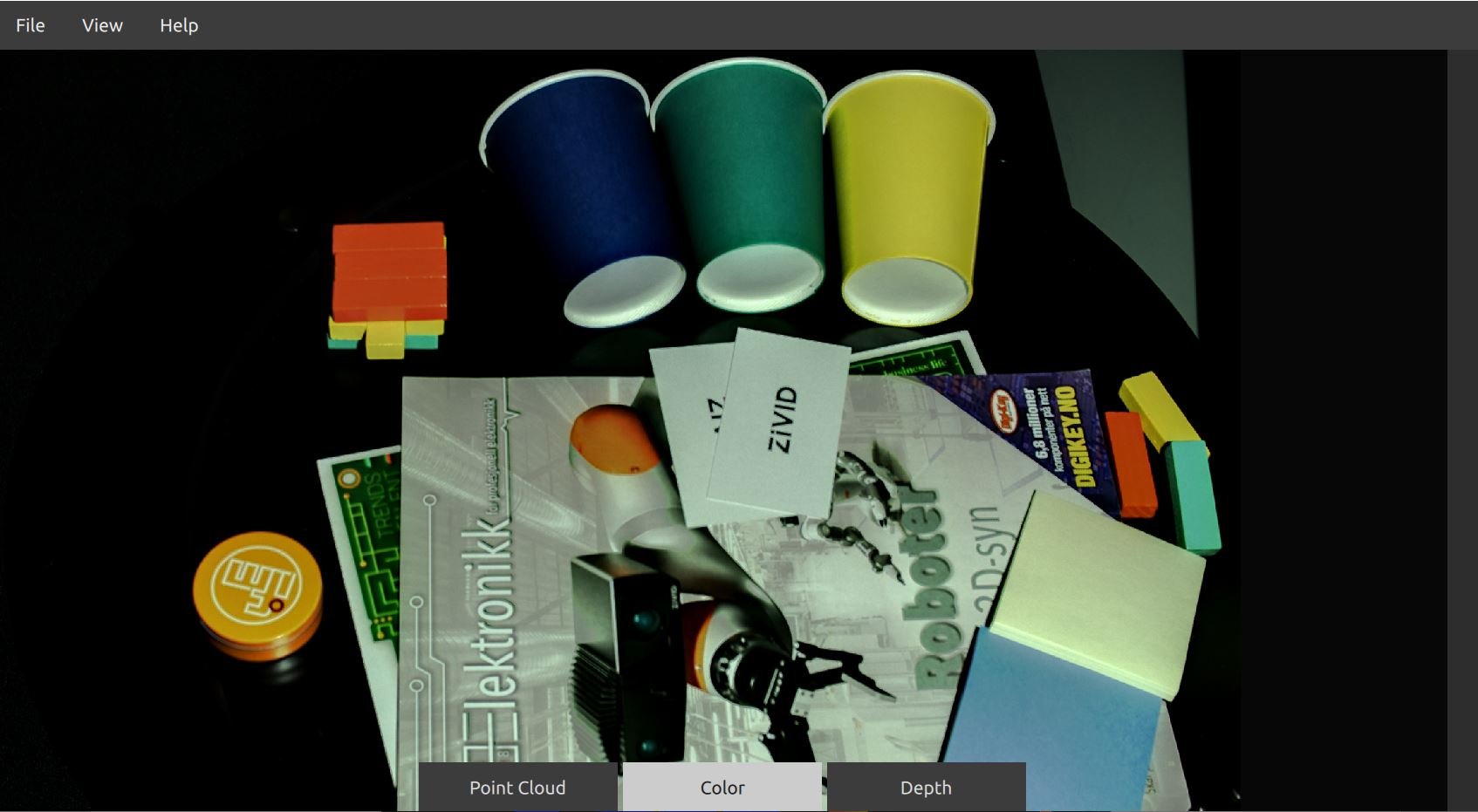
Fig.1.5 2D color image
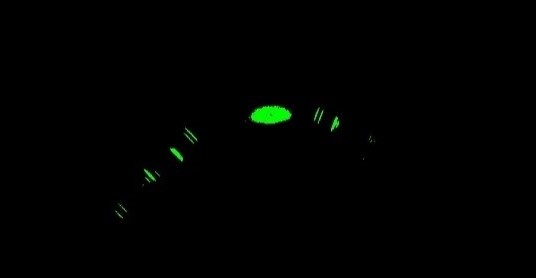
This view displays the depth image of the imaged objects. The color scale shows the variation in distance along the z-axis from the camera to the surfaces of the imaged objects.
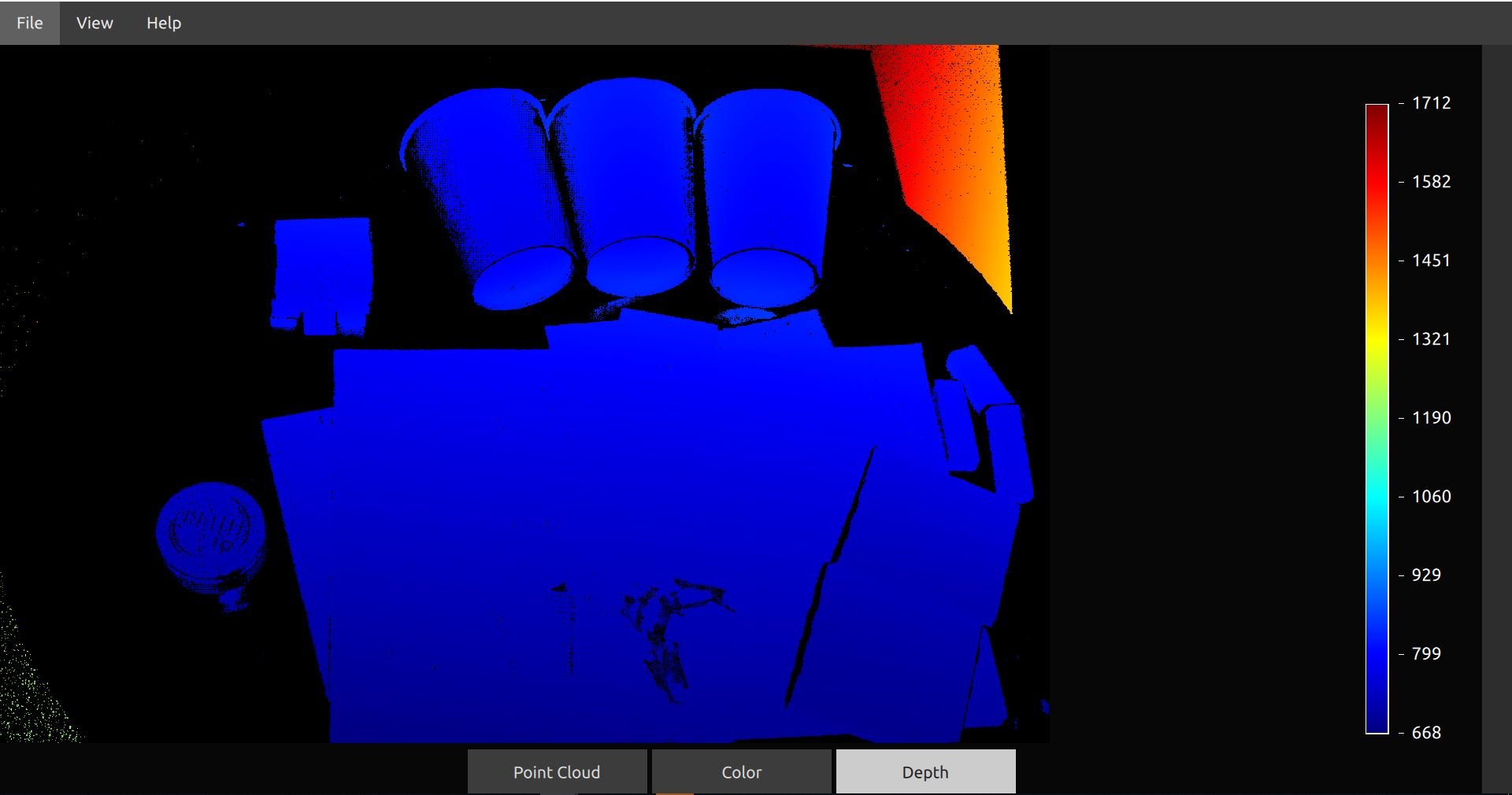
Fig.1.6 2D depth image
1.3 Capture your first image in 3 steps
Step 1. Enter live mode
Fig.1.7 Enter live mode
Step 2. Determine optimal settings to acquire dense points over the entire scene.
The camera has an active iris that controls the amount of light that gets into the camera. The iris can have values from 0-72 where a higher value lets more light in. The iris is open enough to capture objects from a scene at around iris value 8-10. As you keep on increasing the iris you will continue to acquire more and more points on your object until a certain iris value. Beyond this iris value, you will start losing points on your object. A sample graph for a white object is shown below.
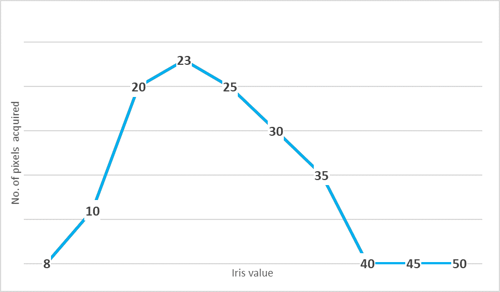
Fig.1.8 Number of pixels acquired and iris value for a white sample object
The Zivid camera can capture high quality images for many objects with a single iris. However, depending on the objects being imaged, you may need more than one iris value to get points on the whole scene.
- Find the iris value that gives you max points on the scene
- Address any areas with missing points. Click add frame to add more iris values
- For dark objects in your scene, if you have to increase the iris beyond 40 to get points, increase the exposure time in increments until you can get points with an iris value 40 or below. This will help you retain depth of field for the images.
- Use the available parameters like the reflection filter
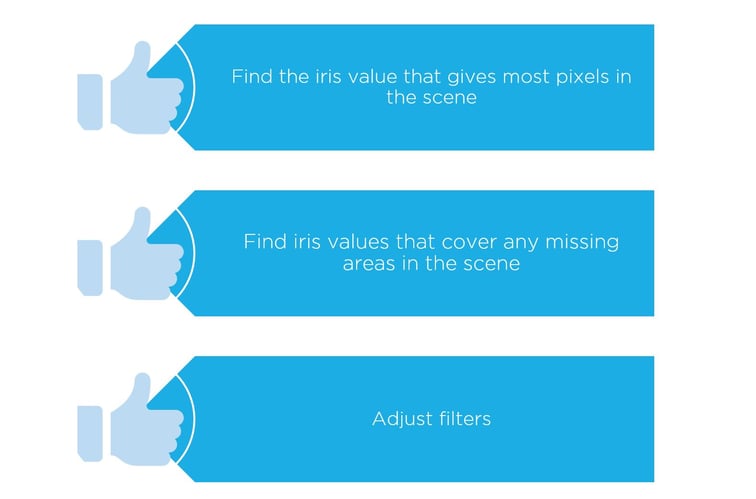
Fig.1.9 Choosing optimal settings
Do not choose iris values randomly or in increments. This reduces data quality. Ensure that you adjust the iris slider in live mode to find the iris(es) that render points over the whole scene. If multiple irises are required, click add frame
Step 3. Click Single/HDR to view the resulting point cloud
1.4 Basic settings
There are several unique filters and settings available in Zivid Studio to ensure that you get a high-quality point cloud. The basic settings to adjust in order to capture a good 3D image are iris, exposure time and brightness.
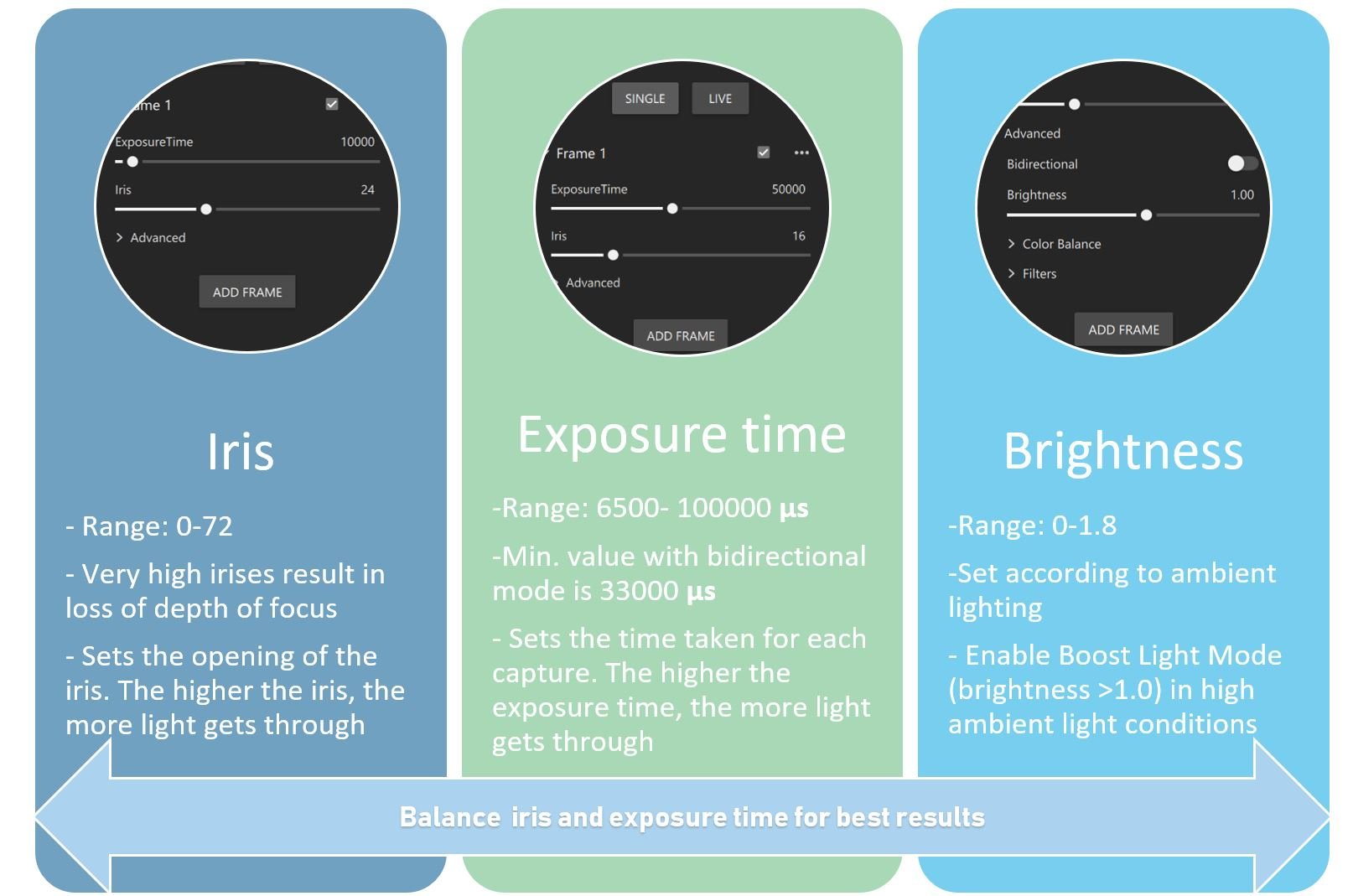
Fig.1.10 Basic settings in Zivid Studio
To ensure that images retain depth of field, set the iris values below 40 and increase the exposure time instead to compensate for loss of light.
1.5 Single frame vs. multi frame HDR
Finding the best combination of iris and exposure time settings
You can increase the amount of light entering the camera by
- Increasing the iris value OR
- Increasing the exposure time setting
In Fig 1.7, different combinations of iris and exposure time settings are used to capture four good images with dense points. However, Image 4 with the highest exposure time and the lowest iris retains the most depth of focus and has the sharpest point cloud.
Increasing the exposure time will require you to decrease the iris for similar results
Decreasing the exposure time will require you to increase the iris for similar results
Multi frame HDR:
All the settings available within Zivid Studio are clustered into frames. For each frame specified, the camera captures an image with all the associated settings (iris, exposure time, brightness etc.) for that frame. The images corresponding to each frame are finally combined to display a single high-quality HDR output image. Refer image 1.9 for illustration.
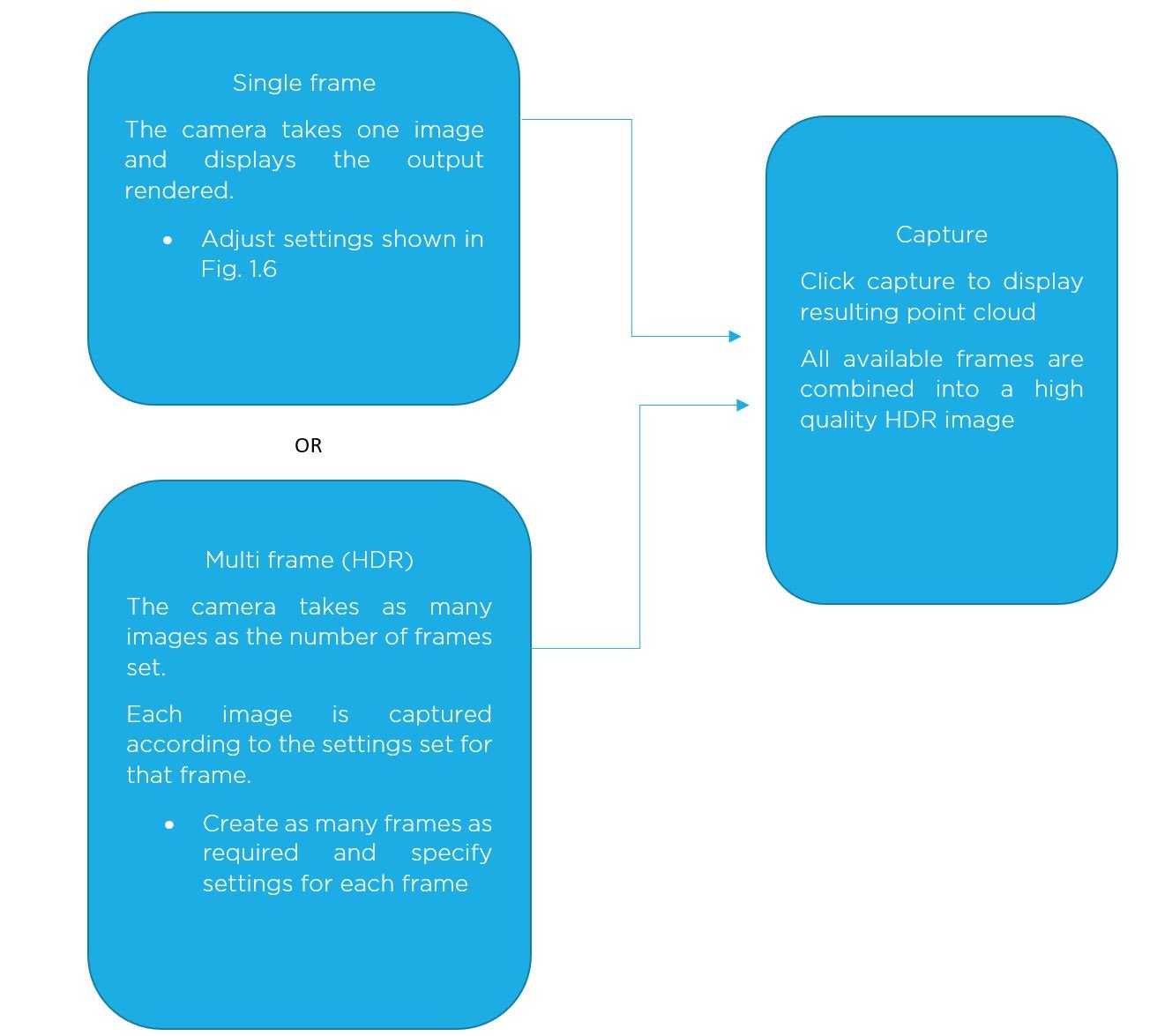
Fig.1.11 Single capture or multi frame HDR capture



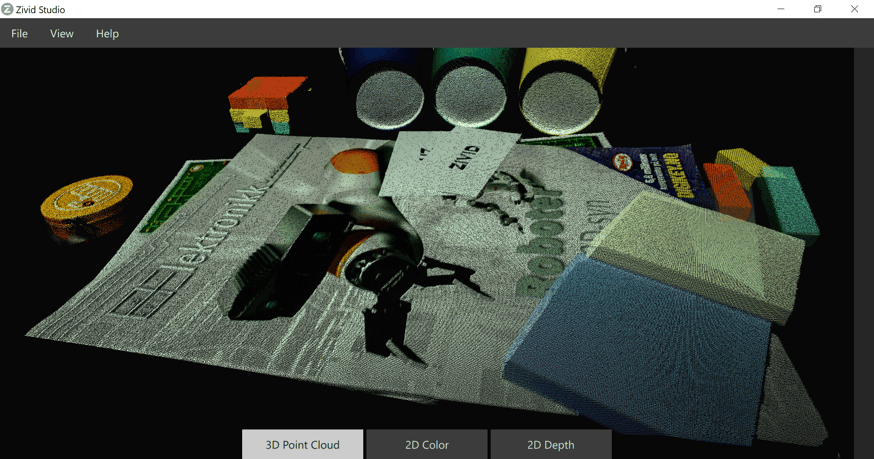
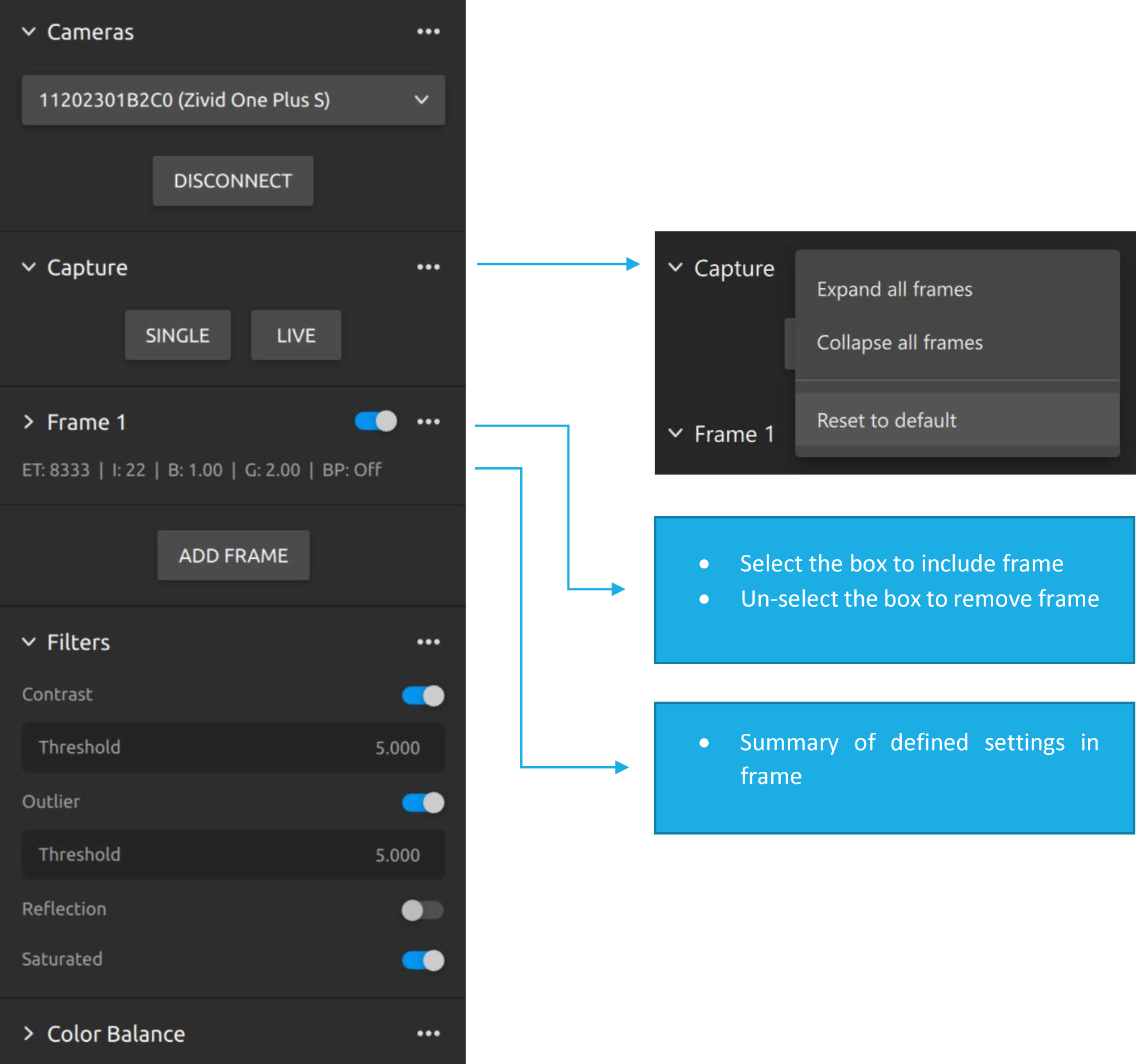
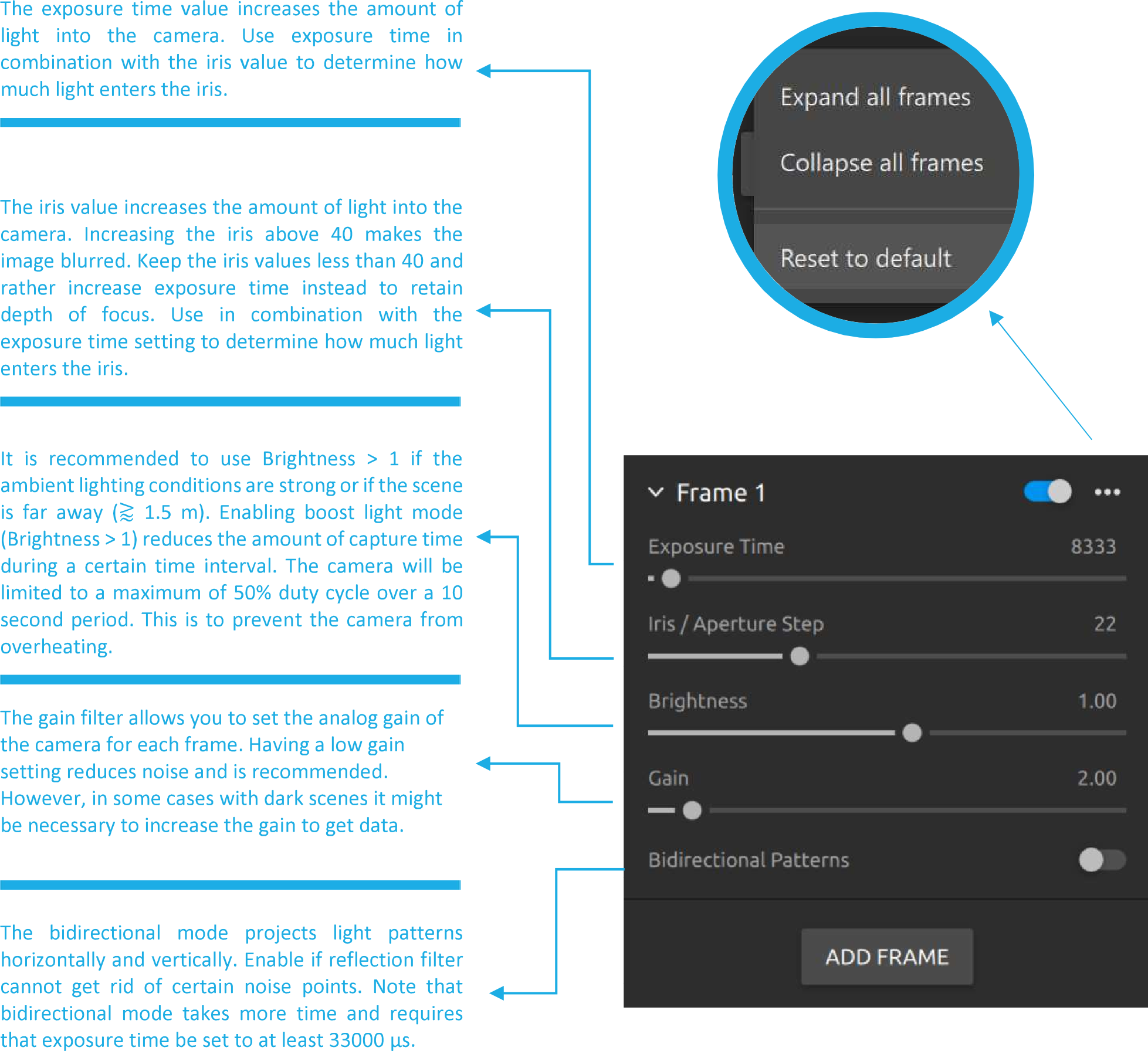
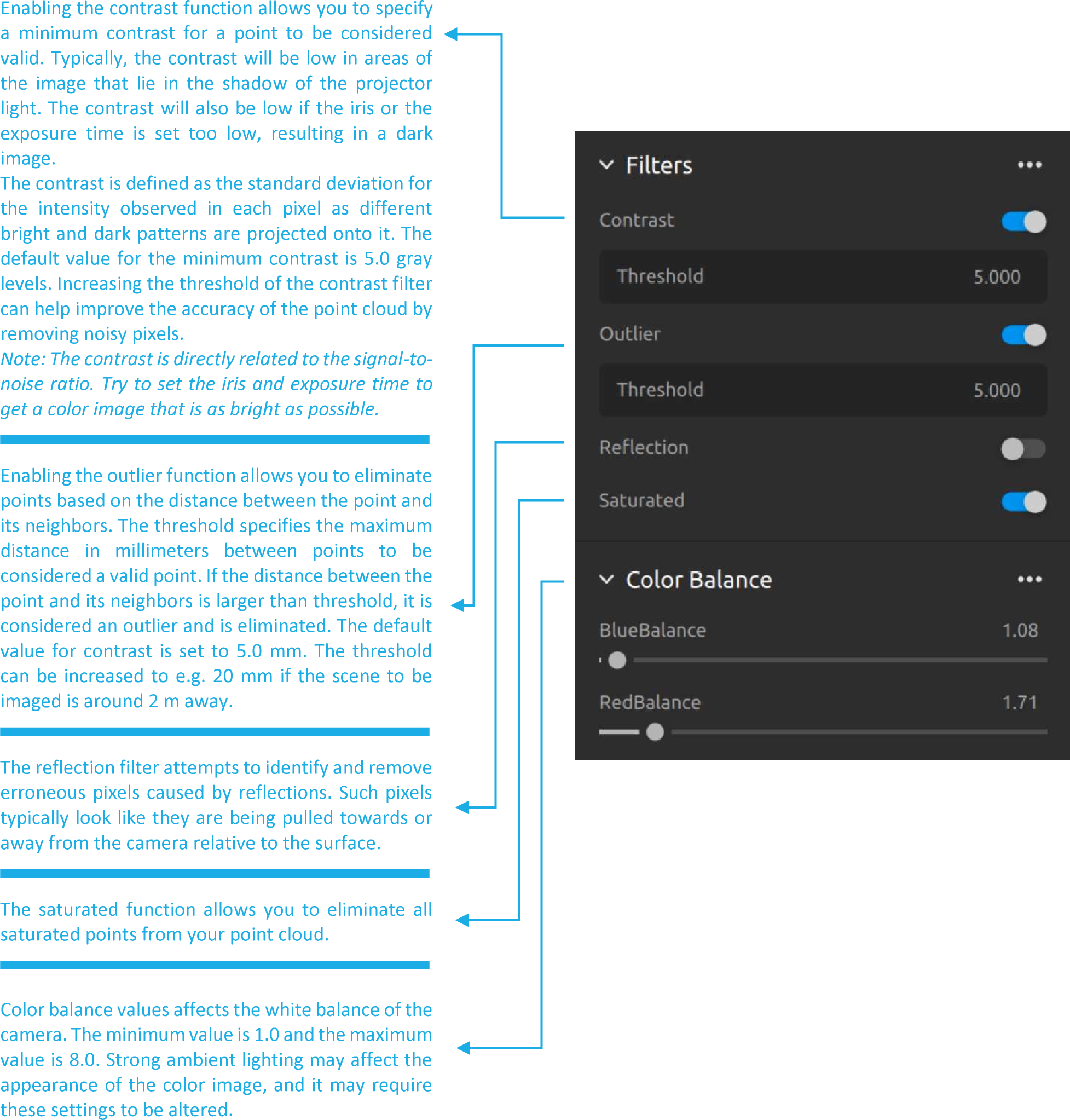

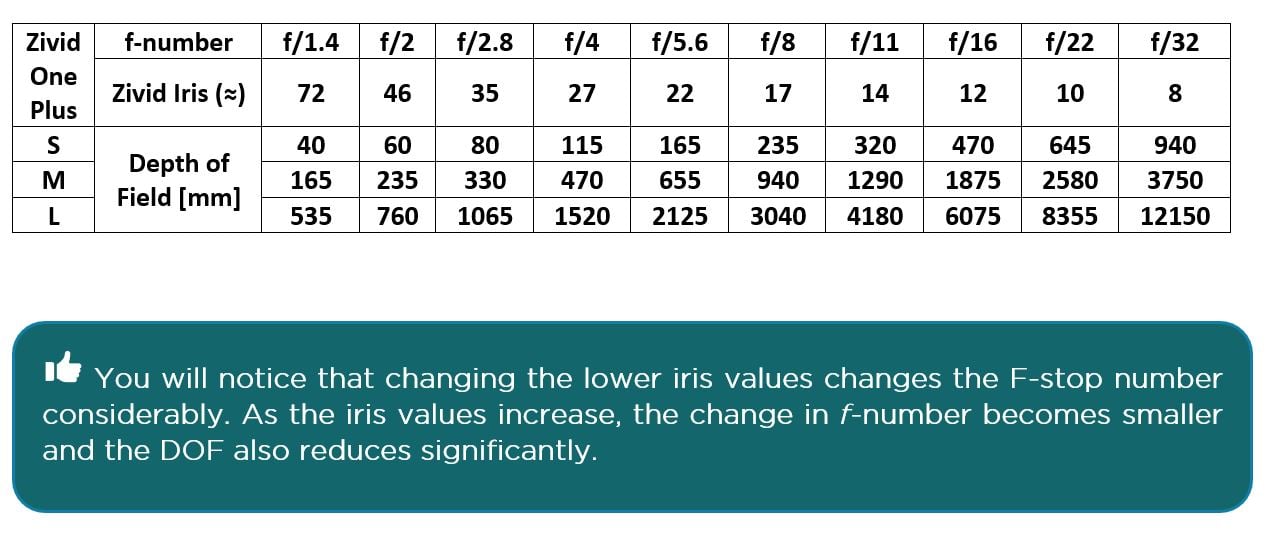

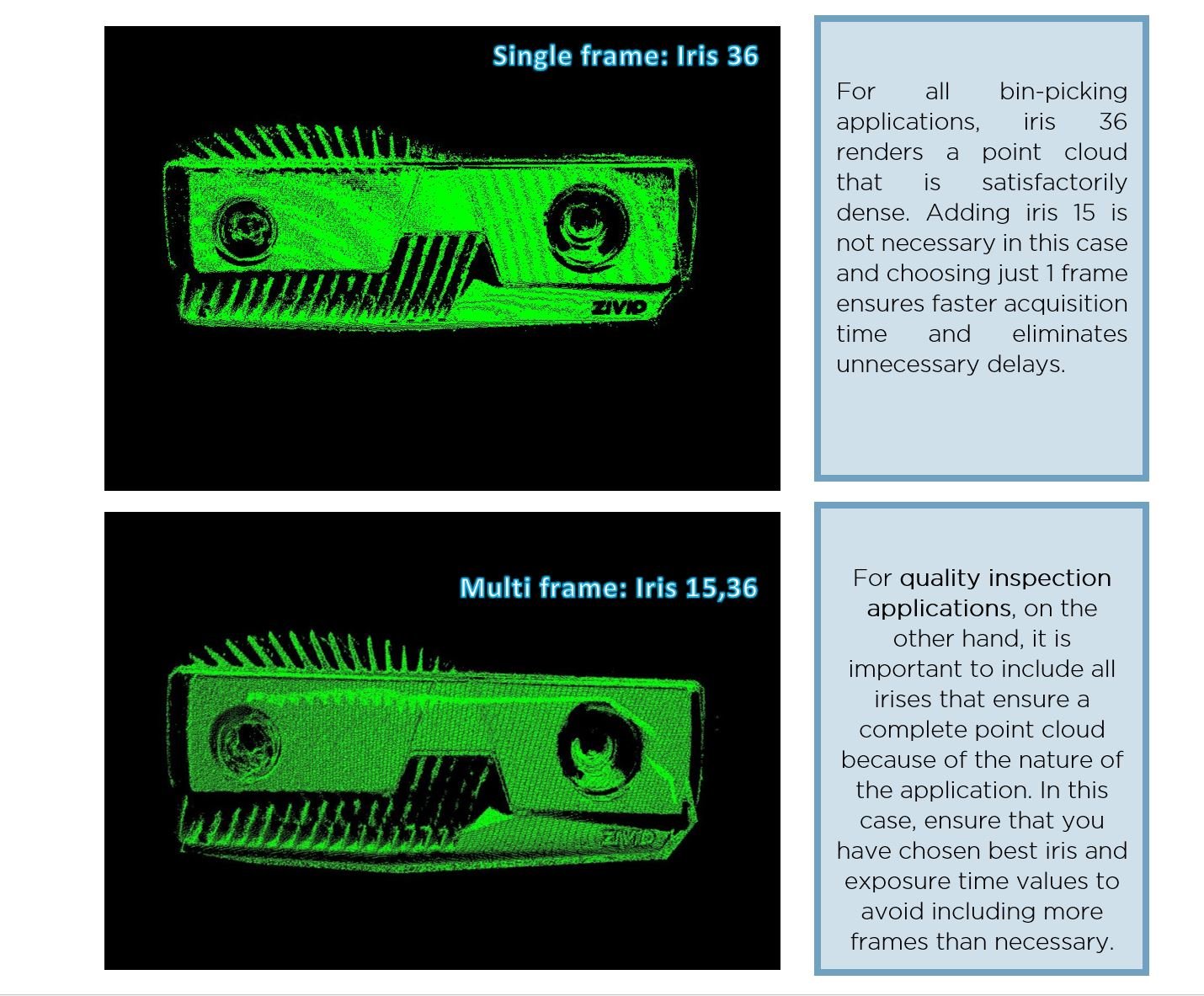

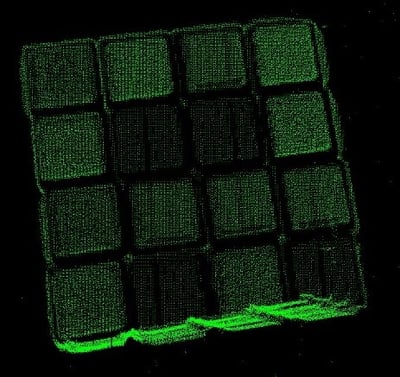
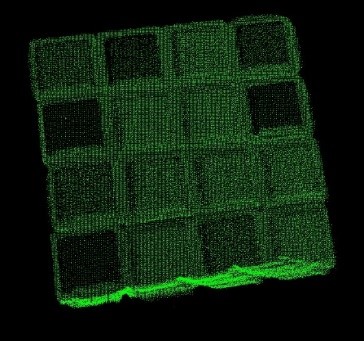
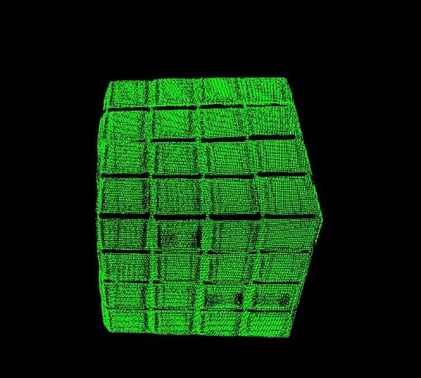
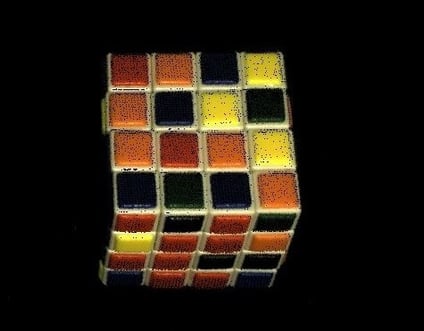
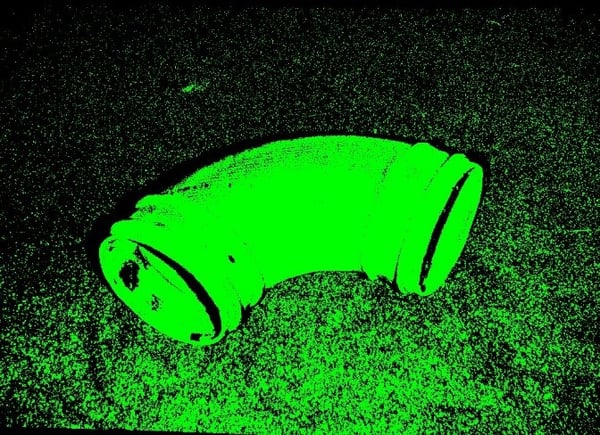
 Fig.3.3.1 Image of the object in 2D
Fig.3.3.1 Image of the object in 2D