点云不完整
小型、密集堆叠或形状复杂的零件需要完整的点云,机器人才能准确判断每个零件的位置、形状和姿态。
反光金属表面

经 CNC 加工的毛坯件、阳极氧化零件及机加工钢件会干扰结构光相机的成像。Zivid 的反射滤波器可清晰采集此类零件的数据。
恶劣工业环境

极端高温、粉尘和振动会使大多数 3D 相机失去校准,导致抓取失败和计划外停机。
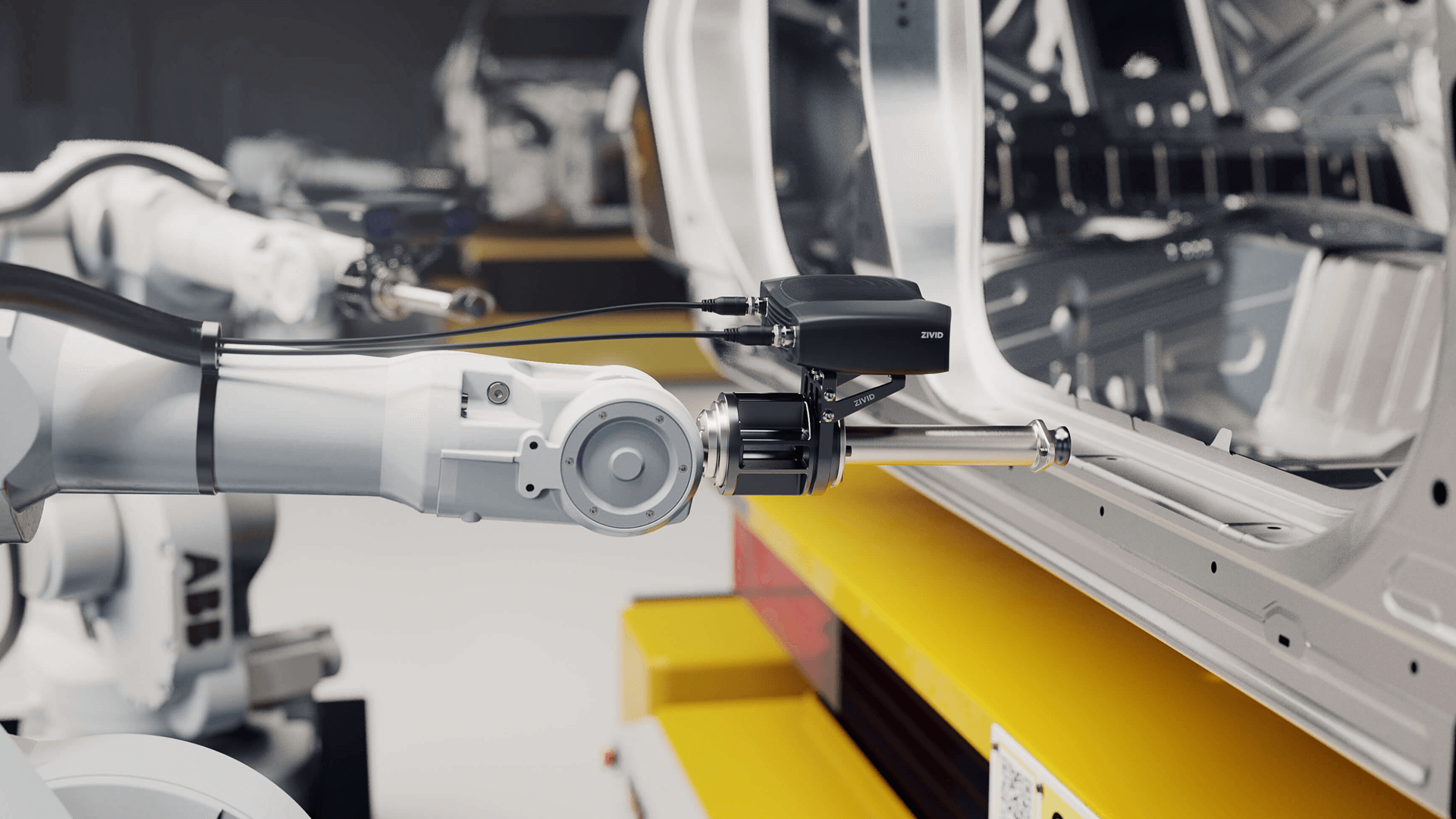
Graymatter Robotics | AI 驱动的机器人表面精加工

Graymatter Robotics | AI 驱动的机器人表面精加工
GrayMatter 将 Zivid 相机集成至其 AI 驱动的机器人工作站,实现了表面精加工应用中精准、色彩真实的三维扫描。
ING Robotics | 制造业三维视觉解决方案
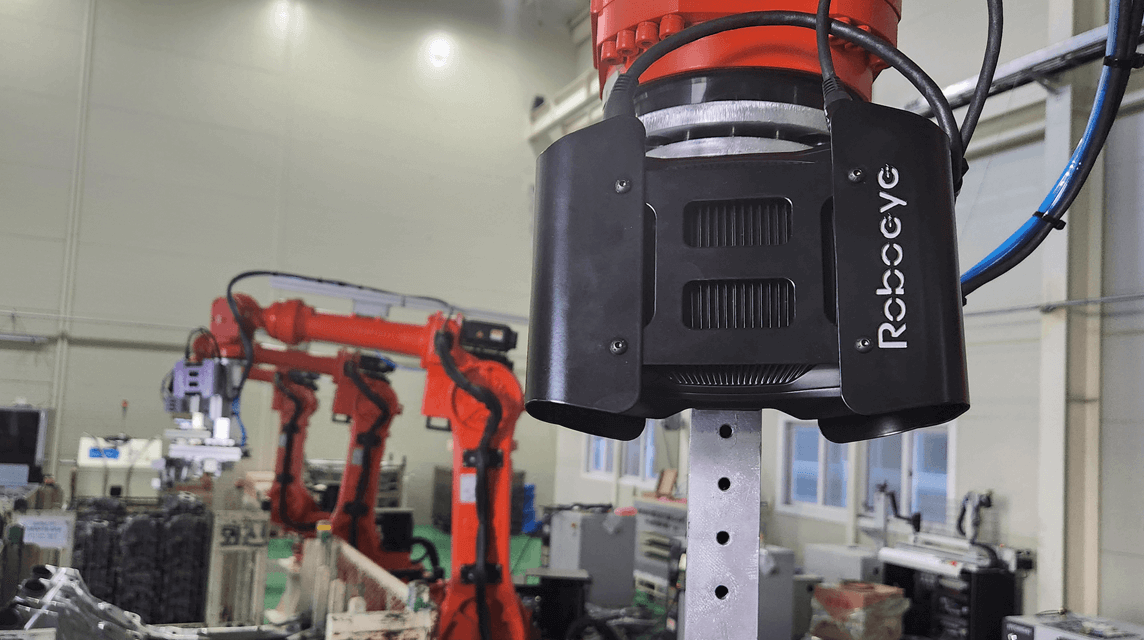
ING Robotics | 制造业三维视觉解决方案
ING Robotics 推出 ROBOEYE,这是一款结合 Zivid 2+ L110 3D 相机的三维视觉解决方案,专为精密装配自动化而设计。