
불완전한 포인트 클라우드
작고 빽빽하게 쌓인 복잡한 부품은 완전한 포인트 클라우드를 필요로 합니다. 로봇이 각 부품의 위치, 형상, 방향을 정확하게 파악할 수 있어야 하기 때문입니다.
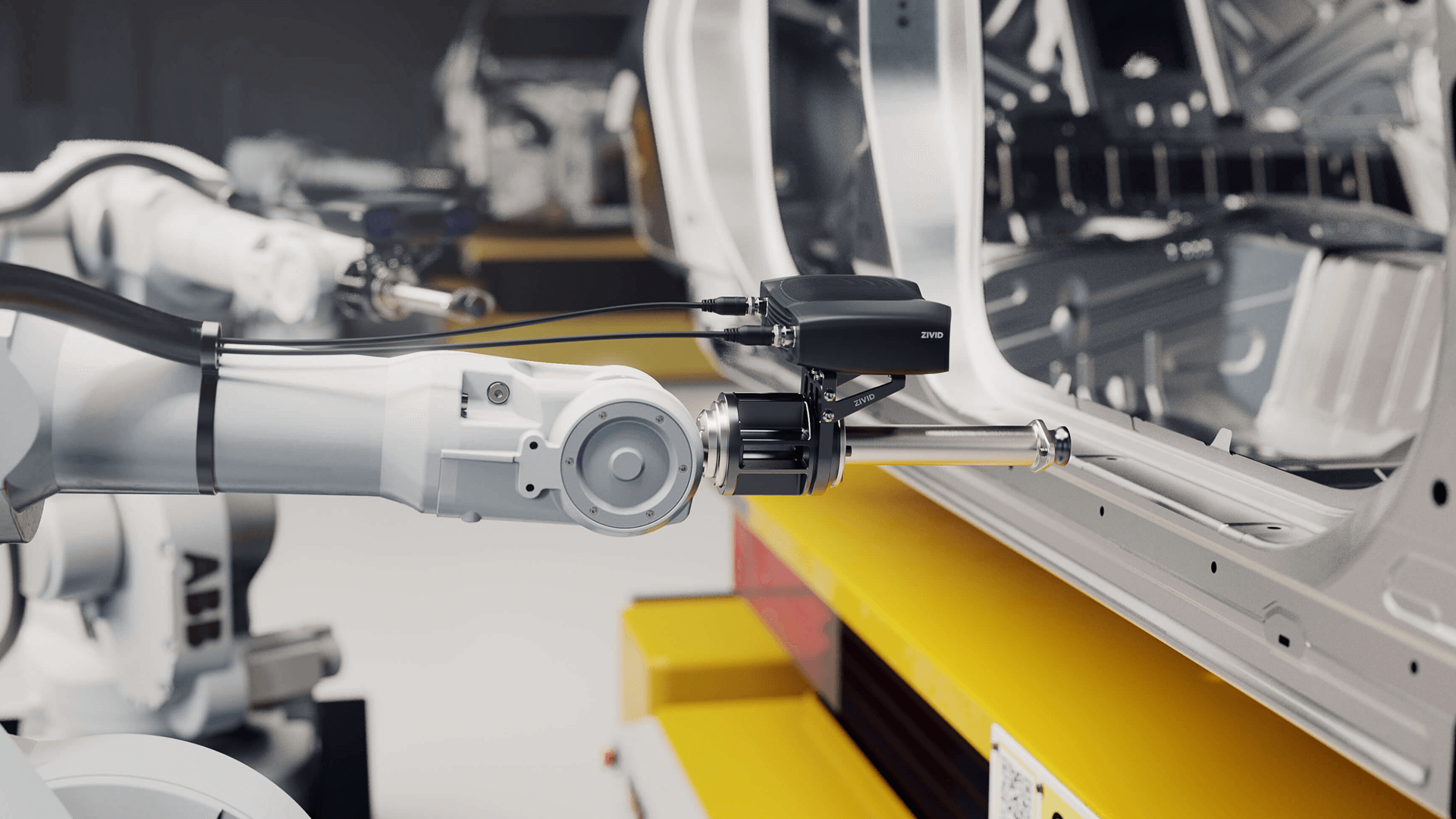
반사성 금속 표면

광택 CNC 블랭크, 아노다이징 부품, 가공된 철강 소재는 구조광 카메라를 혼란시킵니다. Zivid의 반사 필터는 이러한 소재도 깔끔하게 캡처합니다.
가혹한 산업 환경

극심한 열기, 분진, 진동은 대부분의 3D 비전 카메라의 캘리브레이션을 벗어나게 만들어 피킹 실패와 비계획 다운타임을 초래합니다.
Graymatter Robotics | AI 기반 로봇 표면 마감 처리

Graymatter Robotics | AI 기반 로봇 표면 마감 처리
GrayMatter는 Zivid 카메라를 AI 기반 로봇 셀에 통합하여 표면 마감 응용 분야에서 정밀하고 색상 정확도 높은 3D 스캔을 구현했습니다.
ING Robotics | 제조용 3D 비전 솔루션
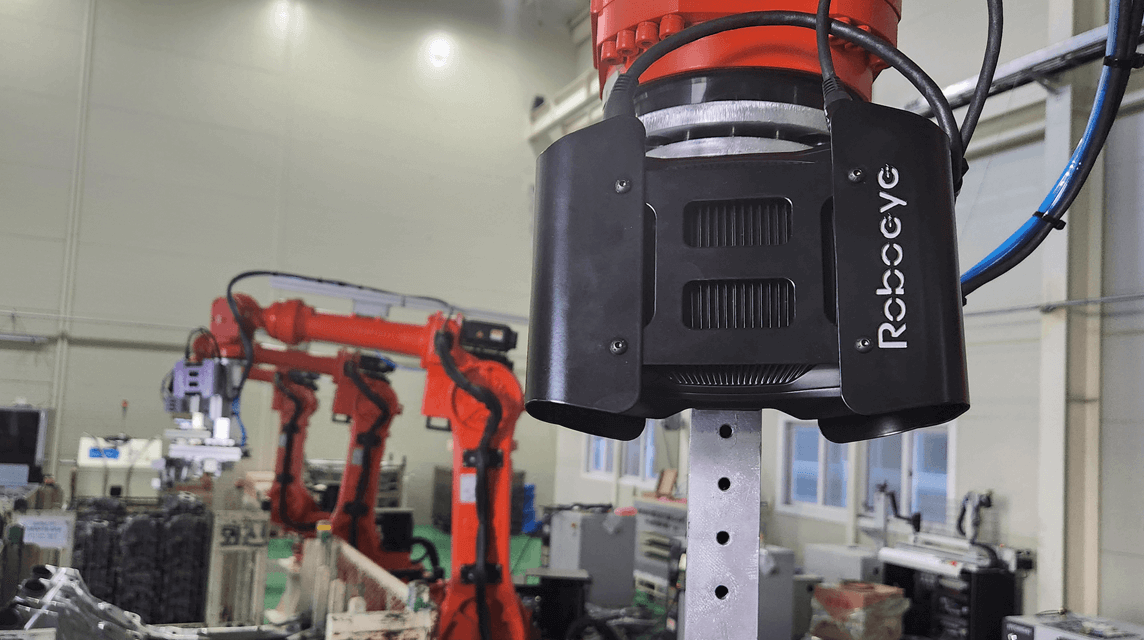
ING Robotics | 제조용 3D 비전 솔루션
ING Robotics는 Zivid 2+ L110을 결합한 3D 비전 솔루션 ROBOEYE를 출시하여 정밀 자동 조립 자동화를 실현했습니다.