


Incomplete point clouds
Small, densely stacked, or complex parts demand a complete point cloud — so the robot can accurately determine each part's location, shape, and orientation.
Reflective metal surfaces

Shiny CNC blanks, anodized parts, and machined steel confuse structured-light cameras. Zivid's reflection filters capture them cleanly.
Harsh industrial environments

Extreme heat, dust, and vibration push most 3D cameras out of calibration — resulting in failed picks and unplanned downtime.
Graymatter Robotics | AI-powered robotic surface finishing

Graymatter Robotics | AI-powered robotic surface finishing
GrayMatter integrated the Zivid camera into their AI-powered robotic cells, enabling precise, color-accurate 3D scanning for surface finishing applications.
ING Robotics | 3D vision solution for manufacturing
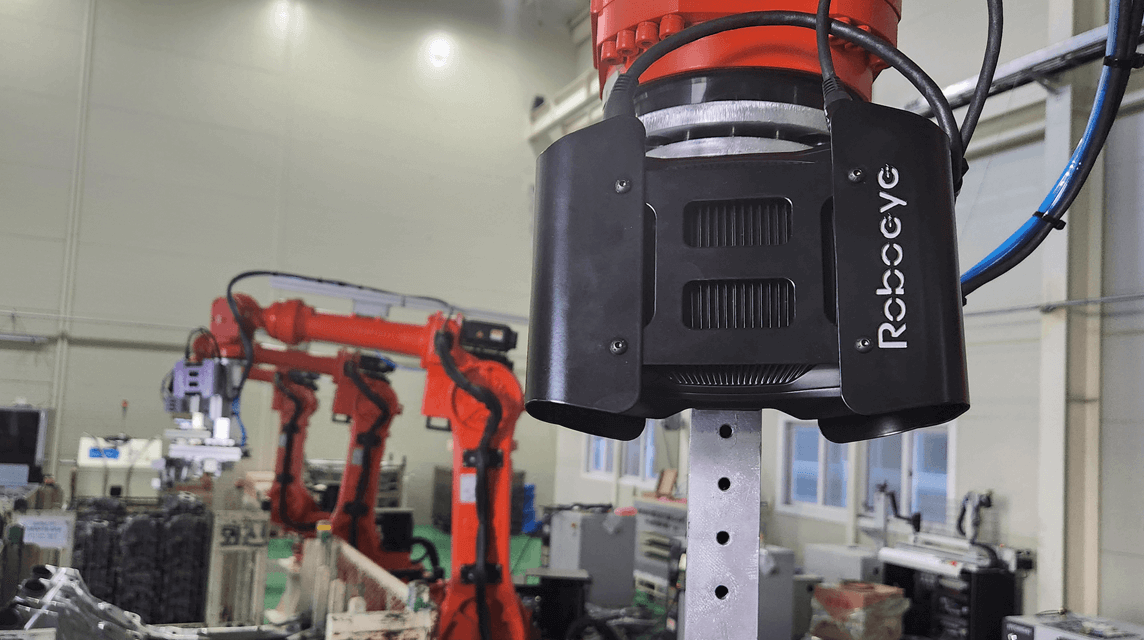
ING Robotics | 3D vision solution for manufacturing
ING Robotics introduced ROBOEYE, a 3D vision solution combining the Zivid 2+ L110 3D for precision assembly automation.
CMES | Automotive Assembly
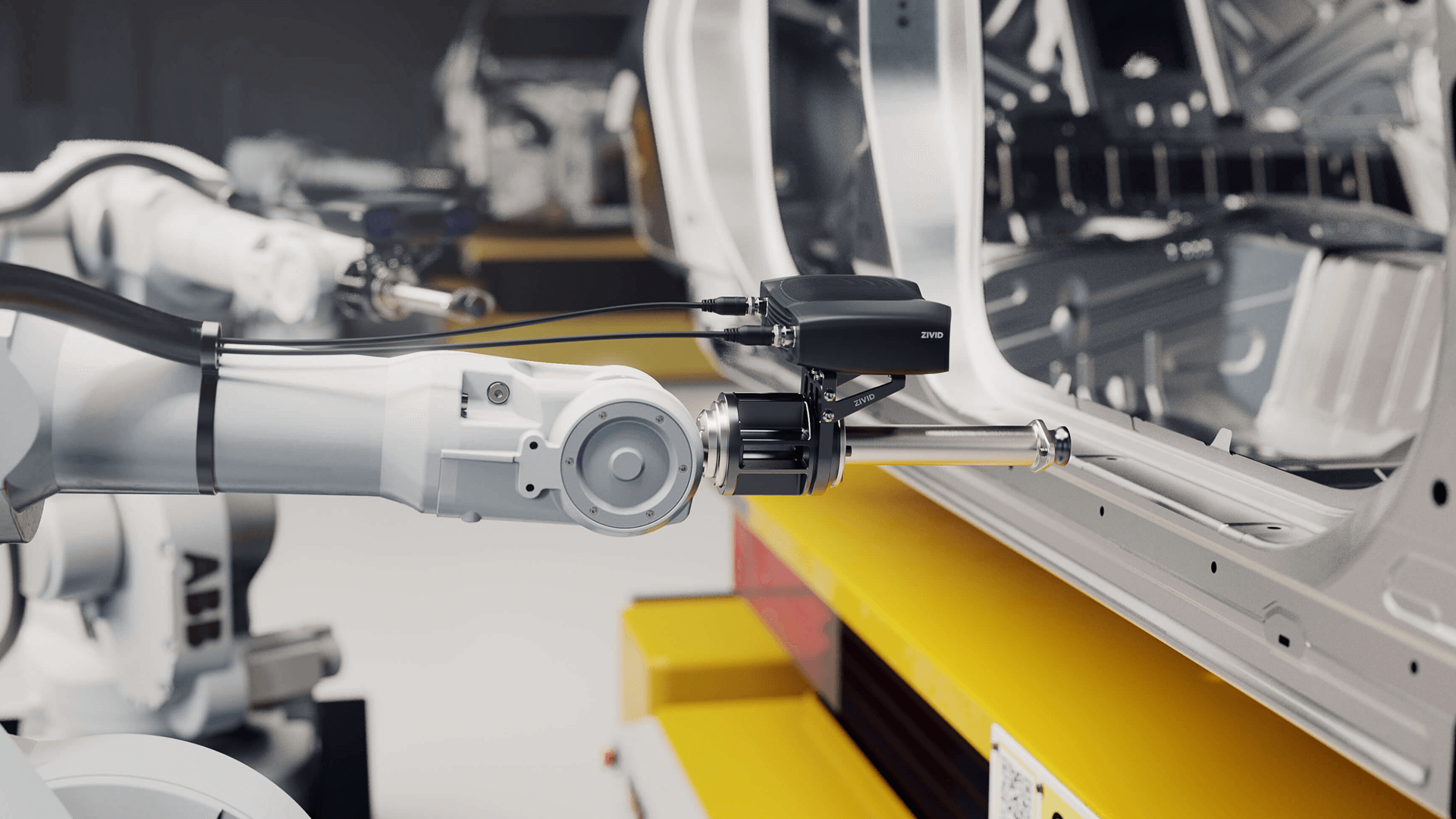
CMES | Automotive Assembly
CMES fuse deep learning with 3D machine vision to change the face of automotive assembly.

