
不完全な点群
小型・密集・複雑な部品は完全な点群を必要とします。ロボットが各部品の位置・形状・姿勢を正確に判断するためです。
金属 鏡面 の表面

CNC ブランク材、アルマイト処理部品、加工済み鋼材は、構造光カメラを混乱させます。 Zivid の反射フィルターはこれらを鮮明にキャプチャします。
過酷な産業環境

極端な熱、粉塵、振動は多くの3Dカメラのキャリブレーションを狂わせ、ピッキング失敗や計画外のダウンタイムを引き起こします。
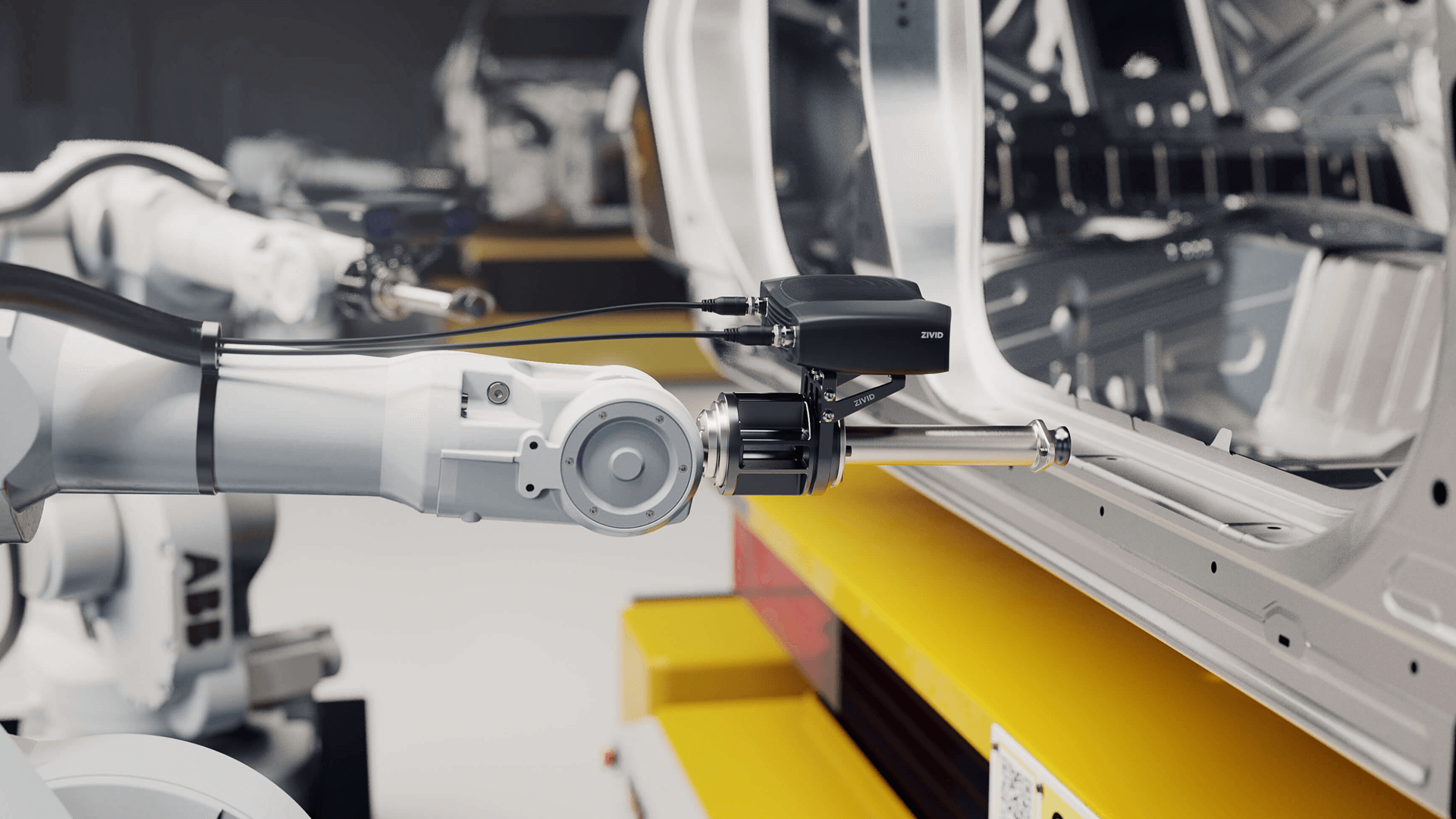
Graymatter Robotics|AI 搭載ロボット表面処理

Graymatter Robotics|AI 搭載ロボット表面処理
GrayMatter は Zivid カメラを AI 搭載ロボットセルに統合し、表面処理アプリケーション向けの精密でカラー 正確度 の高い3Dスキャンを実現しました。
ING Robotics|製造業向け3Dビジョンソリューション
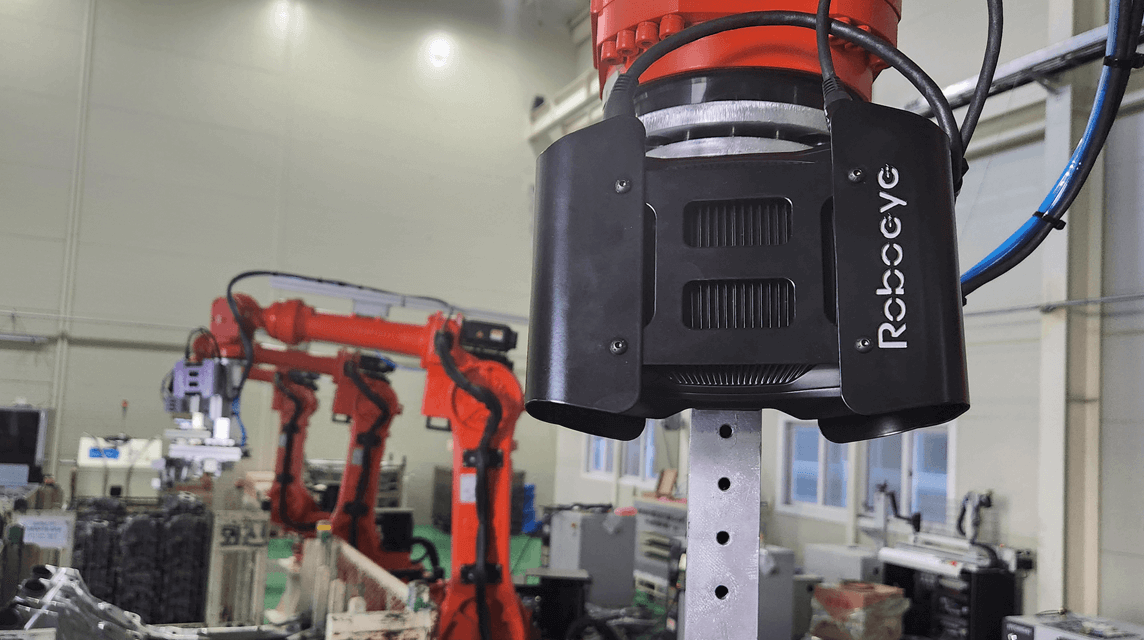
ING Robotics|製造業向け3Dビジョンソリューション
ING Robotics は、精密な組立自動化のために Zivid 2+ L110 3Dを組み合わせた3Dビジョンソリューション ROBOEYE を発表しました。