Robotic Piece Picking
Automated picking of items for order fulfillment, replenishment, sorting, and consolidation in warehousing.

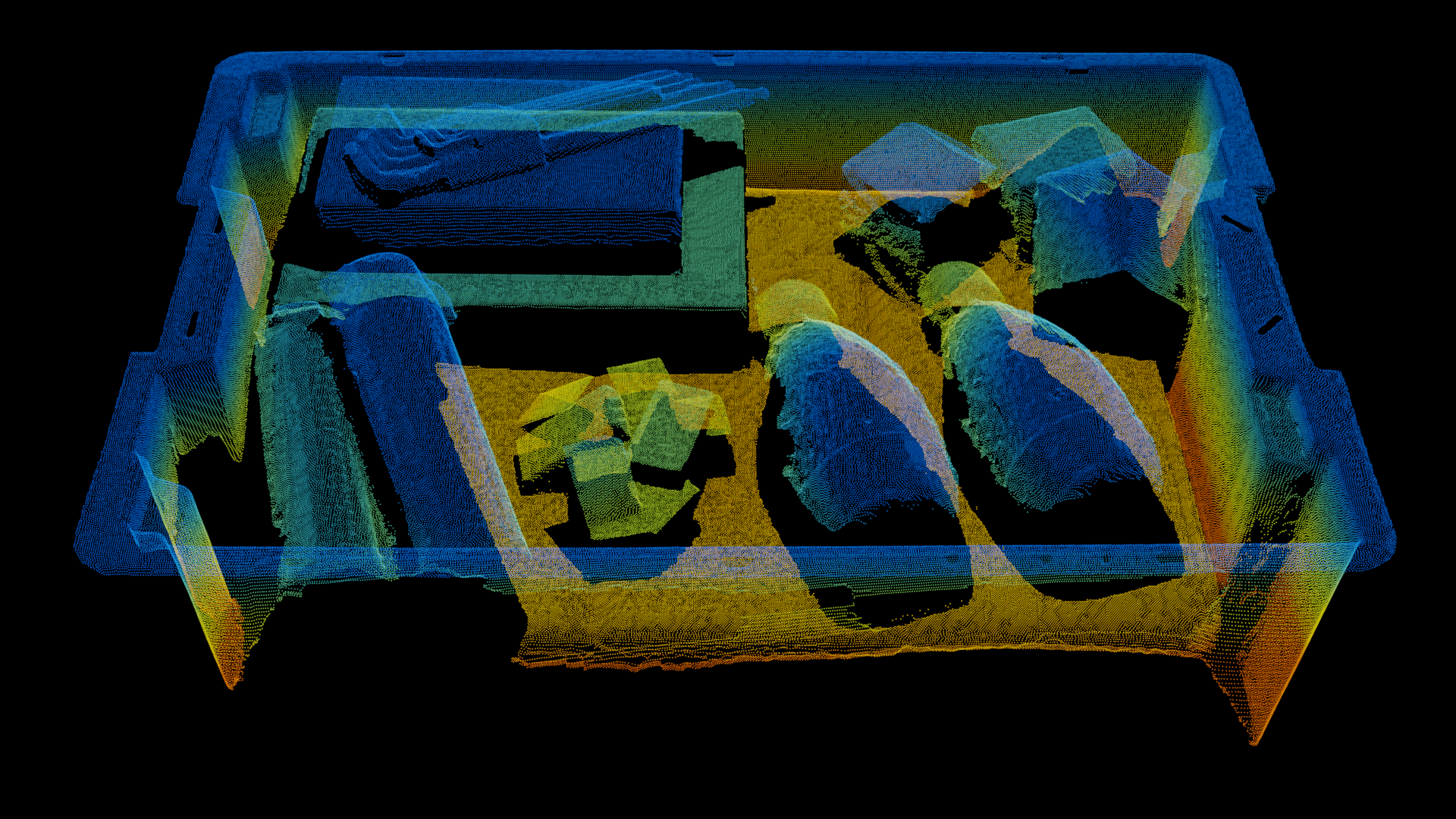
Capture Any Object
High-resolution images and point clouds allow fast and accurate detection of a wide range of SKUs - even small, shiny, or transparent parts.
Reliable Manipulation
Robust 3D vision enables correct pose estimation with reliable grasp and placement planning to prevent mispicks and collisions.
Fast Picking Cycles
While the robot places an item, the vision system quickly identifies the next one, eliminating delays and maximizing picking speed.
%20(1).png?hsLang=en)
%20(1)%20(1).png?hsLang=en)

Reliable Picking for All SKUs
Zivid cameras are industry proven, enabling real robots to fulfill orders consistently from item to item and robot to robot.
With leading 3D reconstruction algorithms and unmatched dynamic range, Zivid captures consistent high-quality point clouds in different environments, and across a wide range of materials—including black, shiny and transparent.

Why Are Zivid 3D Cameras Perfect for Piece Picking Automation?
Join our Application Engineers, Amy and Christian, as they explore the key requirements for effective piece picking automation. They'll show you how to get the highest quality data for your system using a Zivid 3D camera.

.webp?width=1144&height=640&name=siemens%20putwall%20case%20study%20(1).webp)
Siemens, Teknics | Optimizing Put Wall Solutions
Siemens' Simatic Robot Pick AI is used for Teknics' put wall solution for efficient logistics processes.
.webp?width=1144&height=640&name=solwr%20(1).webp)
Solwr | Mobile Picking Robots for Warehouse Automation
Grab™ robot, powered by Zivid's 3D vision, revolutionizes warehouse automation with high-speed, accurate item picking, and flexibility.
.webp?width=2000&height=1126&name=MicrosoftTeams-image%20(77).webp)
Fizyr, The Gripper Company | High-speed piece picking
As part of the Automatica trade show, Zivid has created the first smart, fast, and reliable piece-picking demo that can pick any item, regardless of opacity, transparency, or shape.