Automated Bin Picking
Manufacturing Automation for Assembly, Machine Tending, and Part Sorting

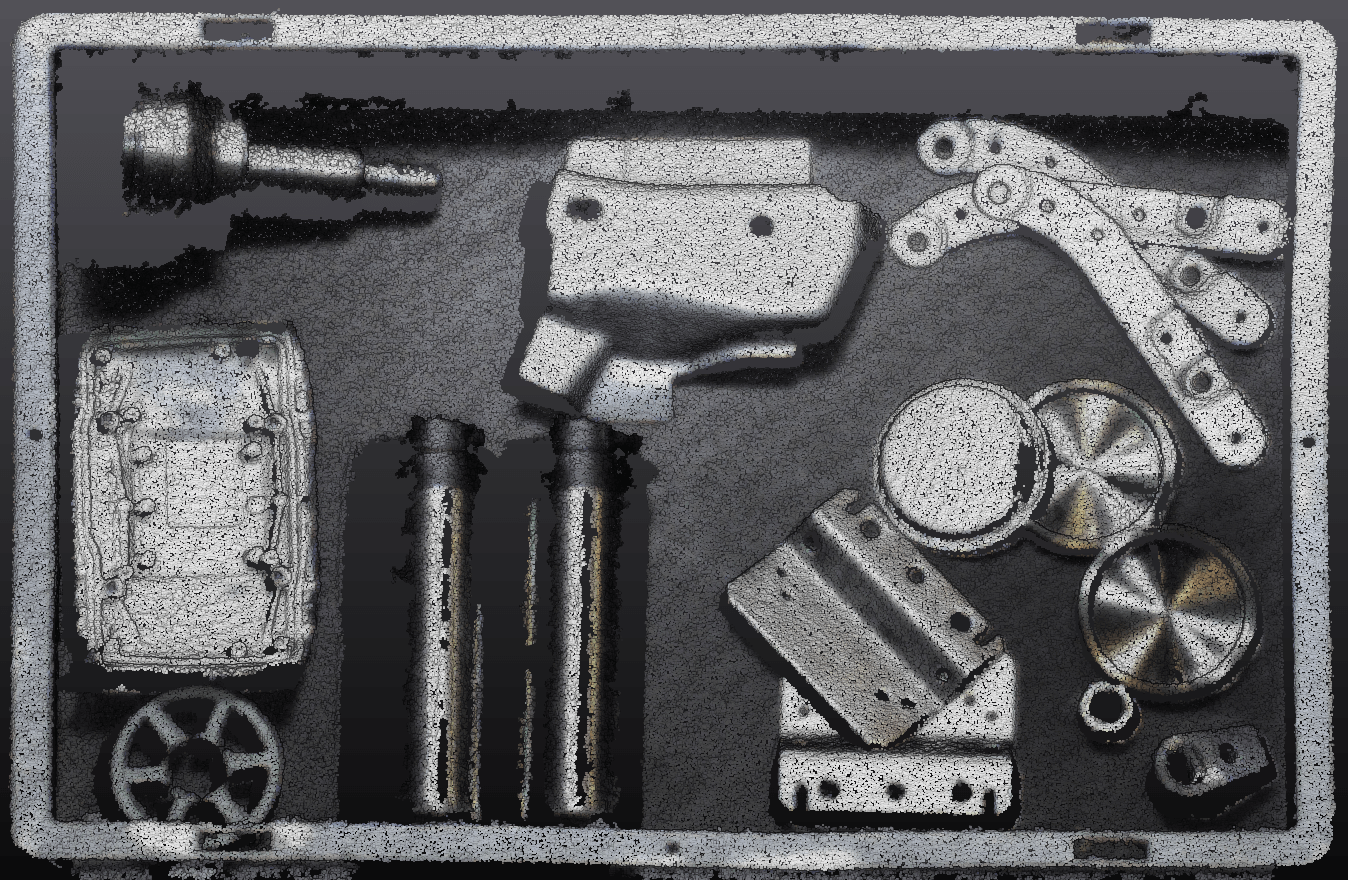
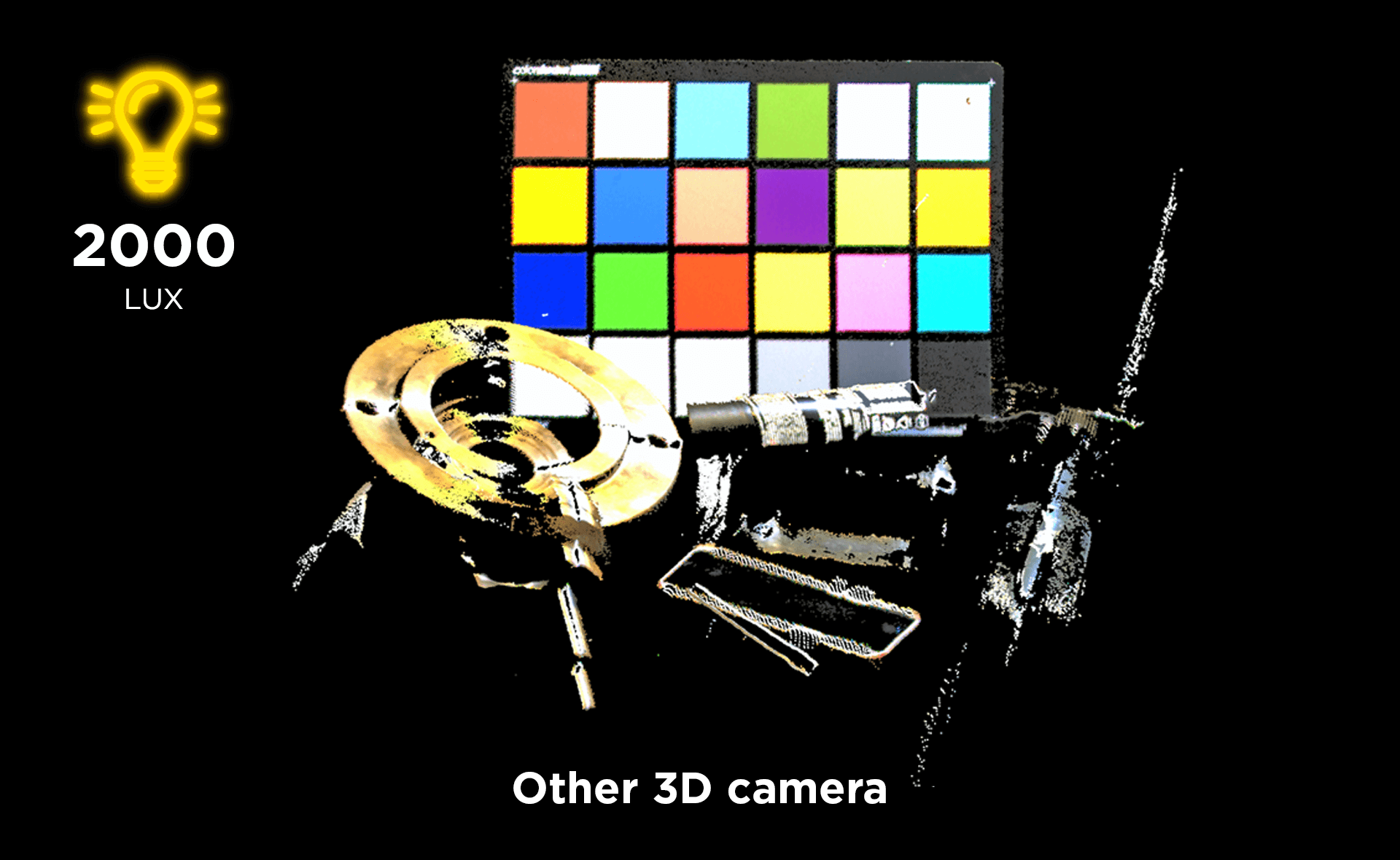
Improved Object Recognition
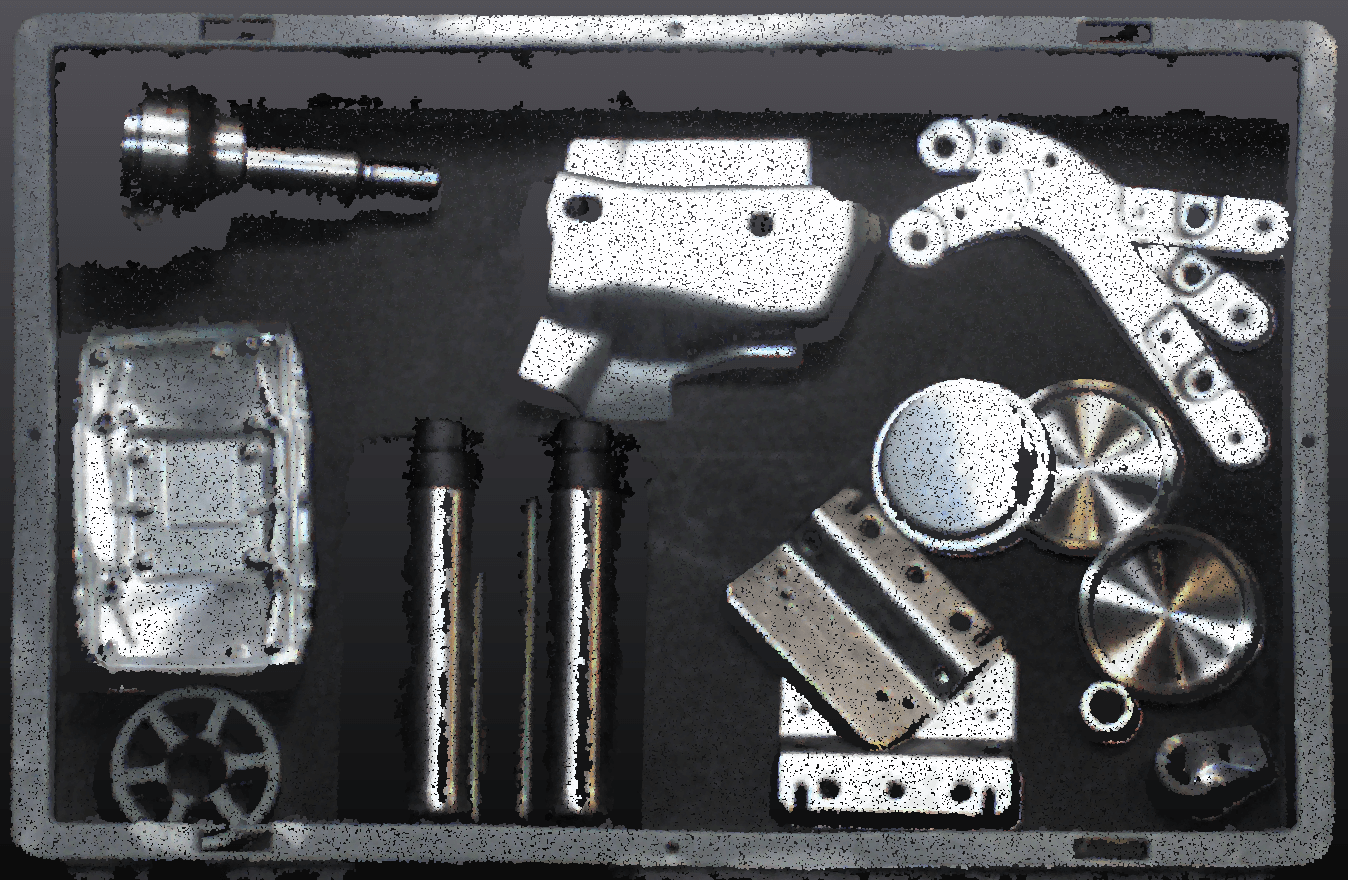
With high-resolution, ultra-precise native 3D point clouds, the robot can enhance object recognition and detect a greater number of parts.
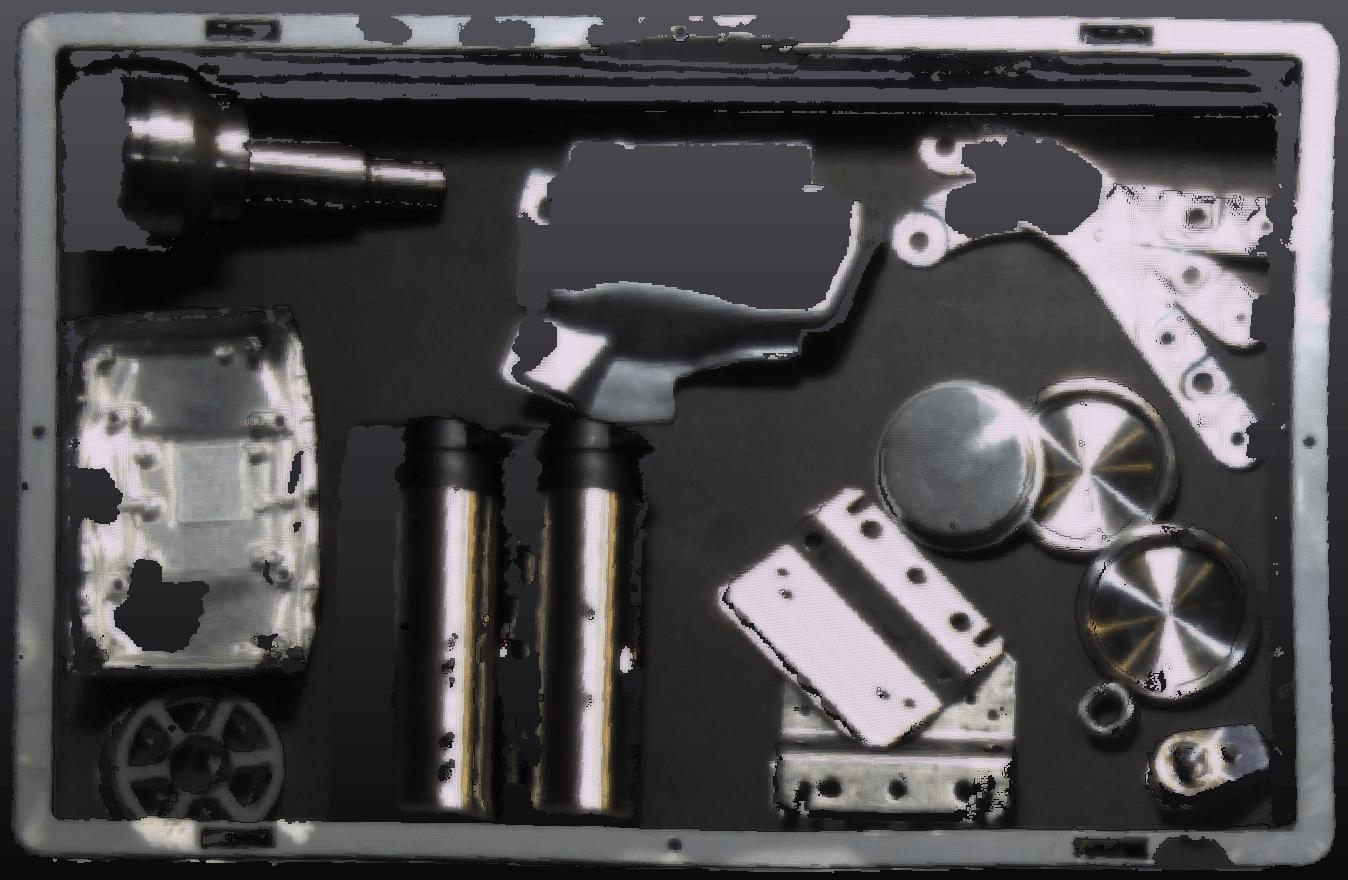
Reliable 3D Picking Accuracy
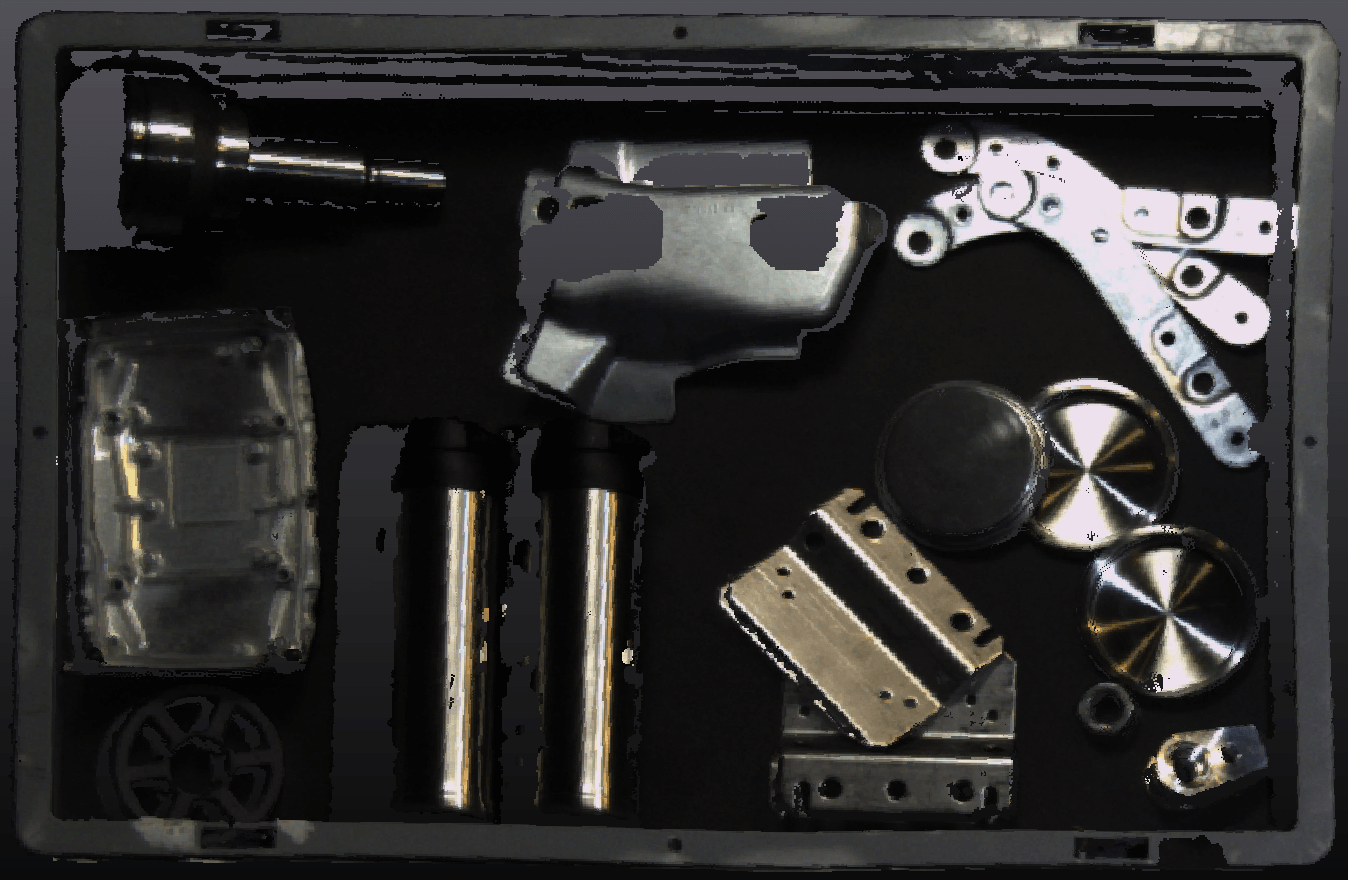
3D vision enables reliable object boundary recognition by accurately capturing object's size, orientation, and absolute position.
Correct Placement and Orientation
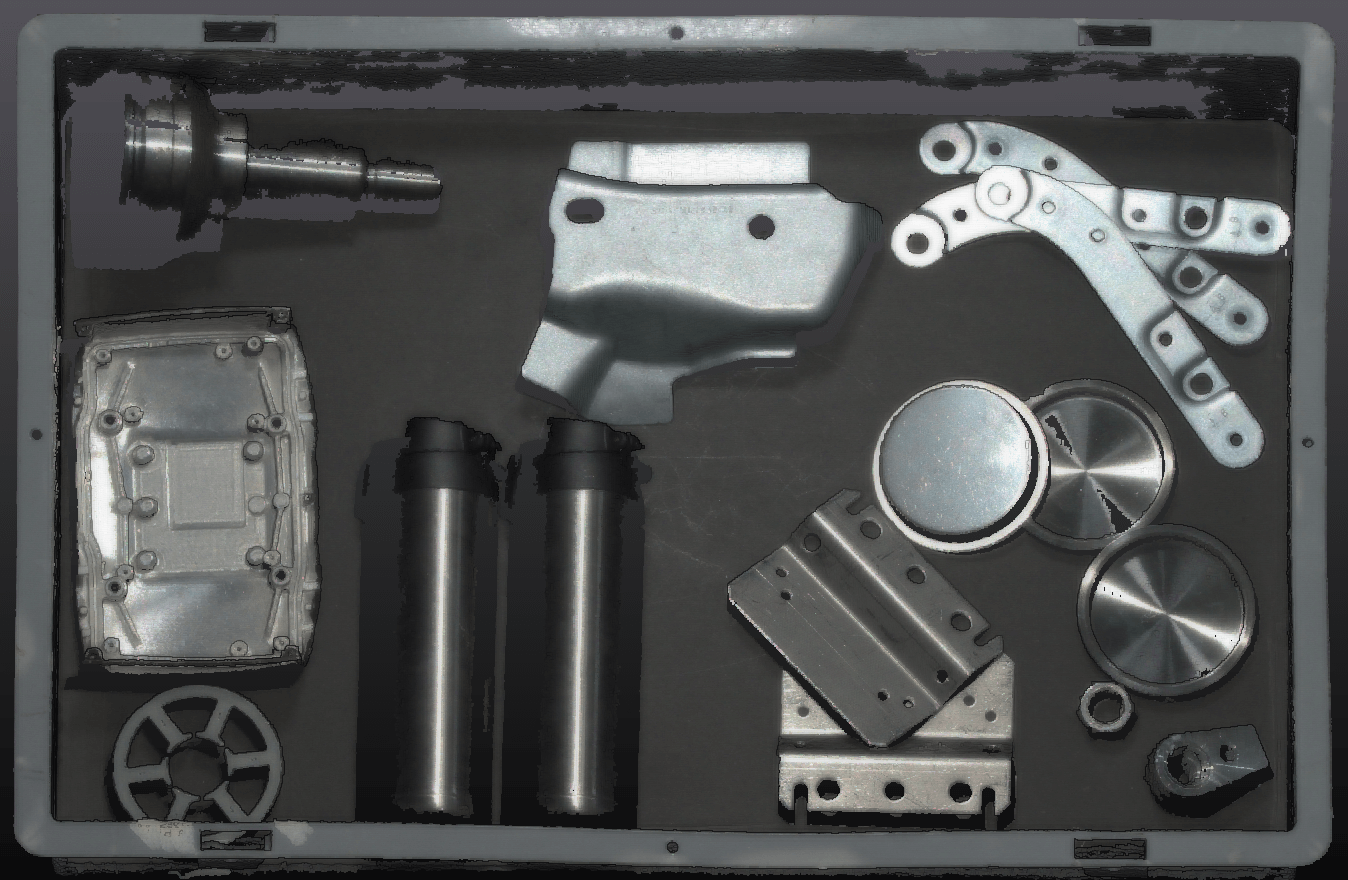
Vision-guided robots can perform precise pick-and-place tasks, ensuring accurate placement and orientation while avoiding collisions and damage.
.png?hsLang=en)




Why Zivid 3D Cameras Are Perfect for Manufacturing Automation?
Our Application Engineer, German, discovers how Zivid 2+ R-Series 3D cameras bring high precision and versatility to manufacturing tasks like bin-picking, machine tending, assembly, and robotic surface finishing.

ING Robotics' all-in-one 3D vision solution for manufacturing
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
Innodura's complex parts hanging solution for assembly lines
Hanging parts for processing is a task that has been primarily carried out manually, and automating it has proven to be a real challenge.
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)
Plaif's appliance manufacturing solution
Plaif has leveraged advances in AI and 3D machine vision to bring a high-reliability solution in appliance manufacturing.