Robotic Parcel Induction
Warehouse Automation for Induction, Sorting, and Singulation

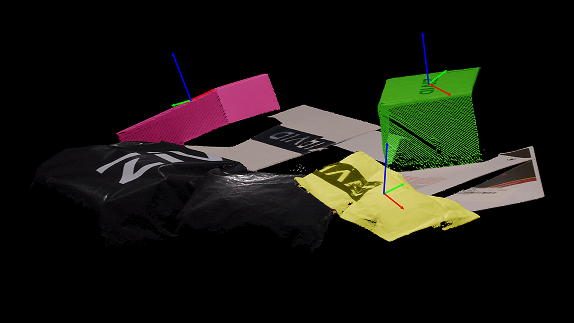
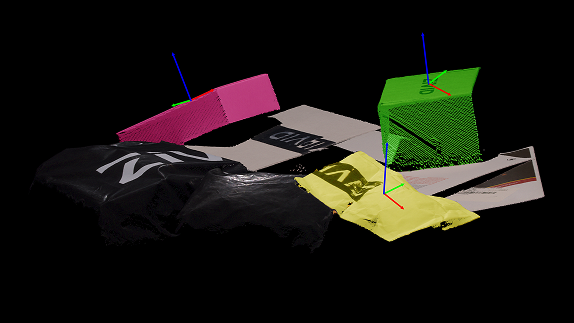
Parcel segmentation and recognition
Using perception with 2D and 3D cameras, the robot searches a pile of parcels and attempts to segment each parcel from one another.
Locate and evaluate the robot's pick point
The robot attempts to estimate which of the detected parcels are best suited to be picked up, and where to grasp it. This is called pose estimation.
Repeat rapidly and reliably
While the robot is placing the parcel and returning back to the pile, the vision system selects the next parcel so the robot can proceed to pick it up without having to wait.

Which camera performs the best for parcel induction?
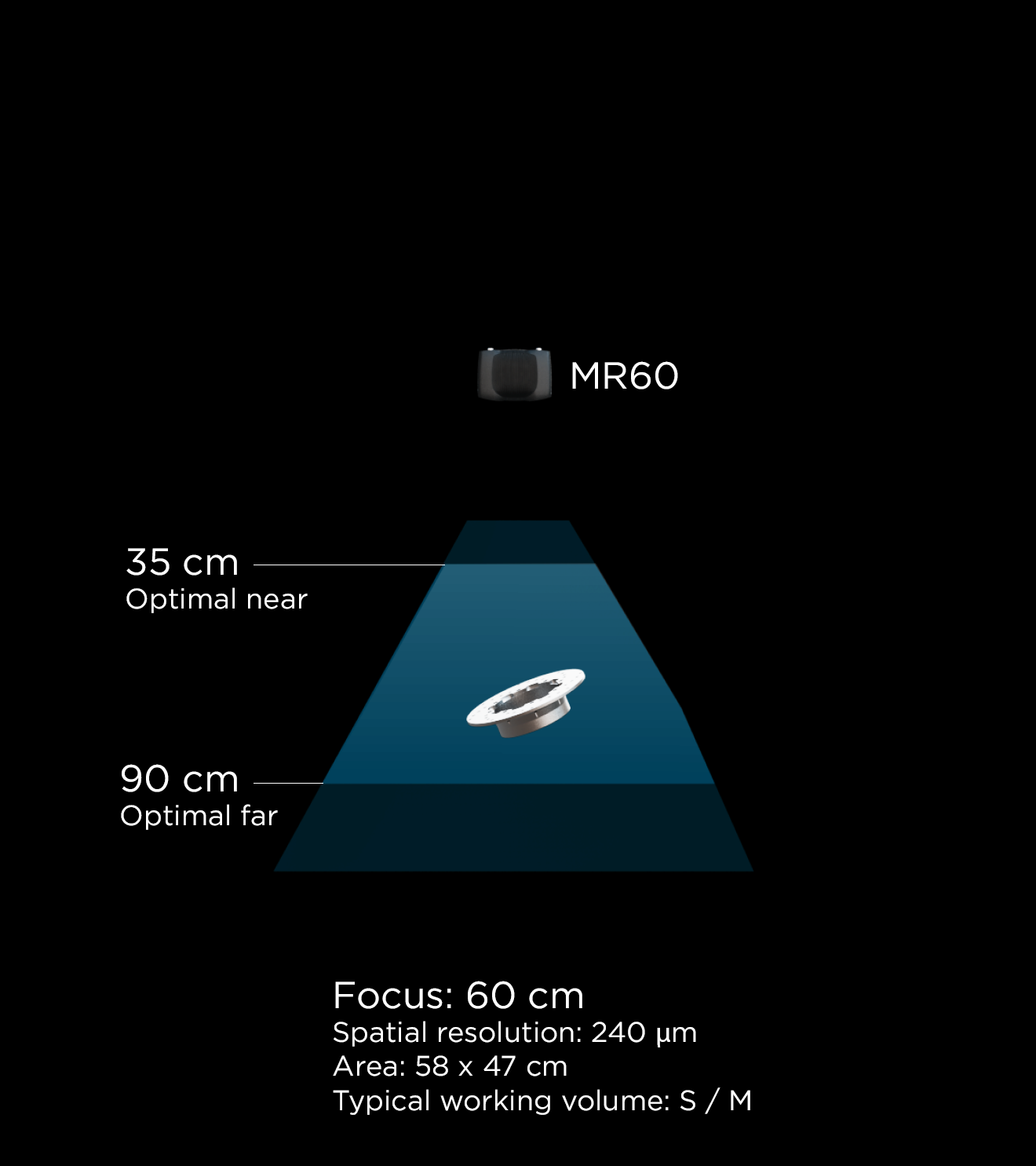
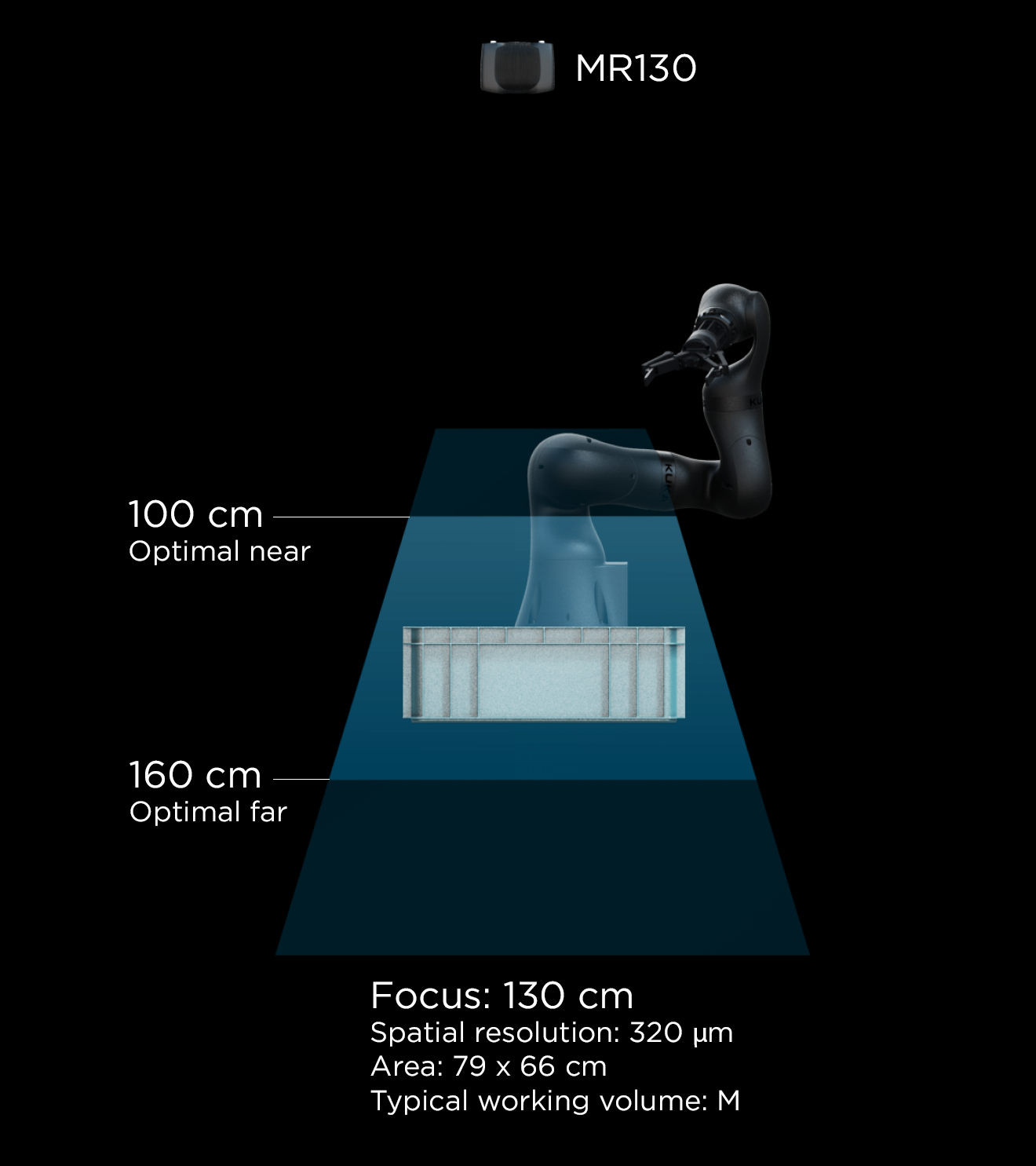
Our Technical Product Manager, Christian, compares the Zivid 2+ MR130 to two other cameras from leading manufacturers - discover which one is best suited for parcel induction!

.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
Handling unknown objects in logistics
Fizyr detection and picking software, together with Zivid 3D cameras are solving biggest logistics challenges.
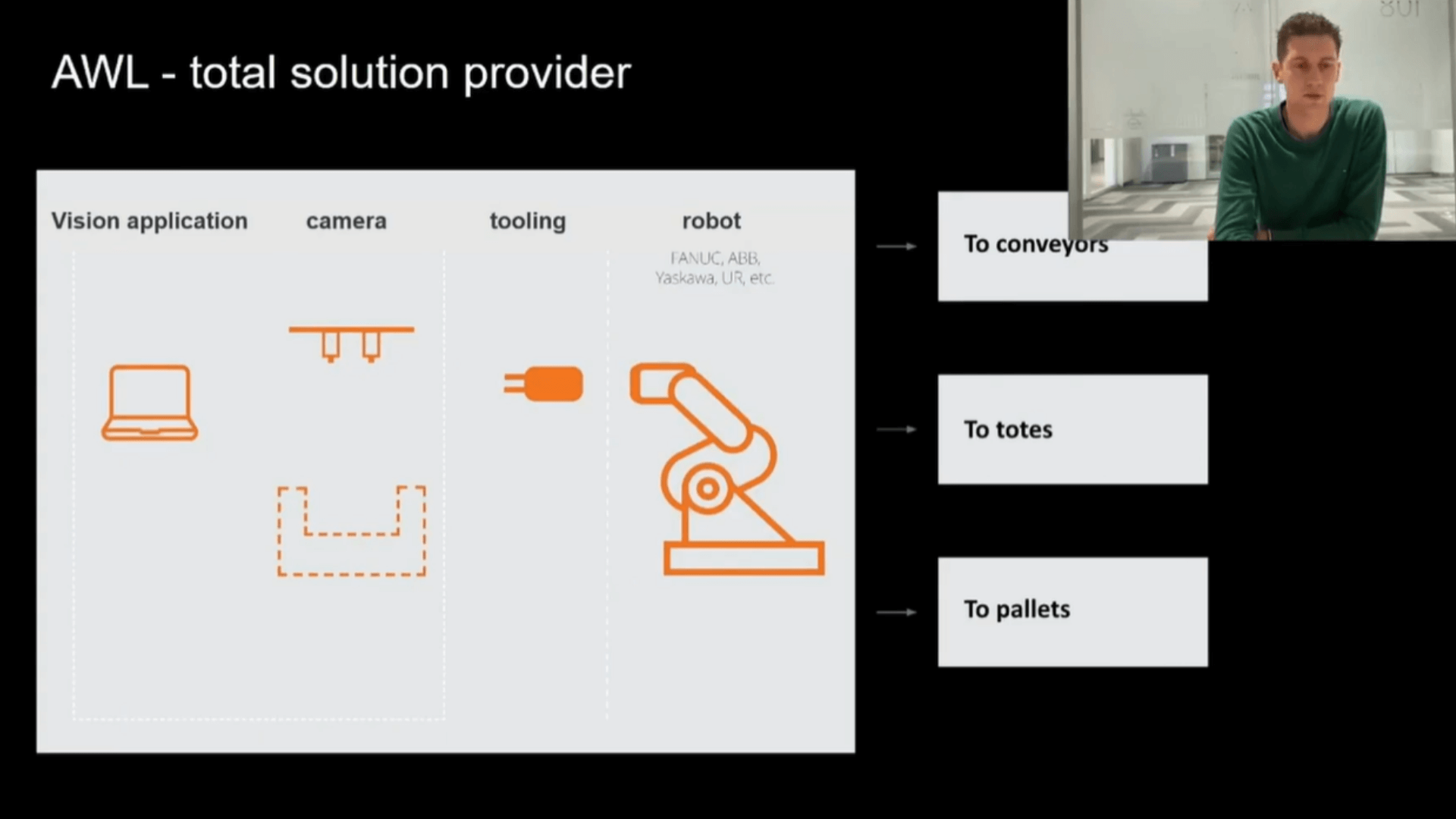
Changing the Game of Parcel Sorting with 3D Vision
By collaborating with partners, we achieved the world's first successful sorting inductor in the logistics market.
Parcel induction at high-speed
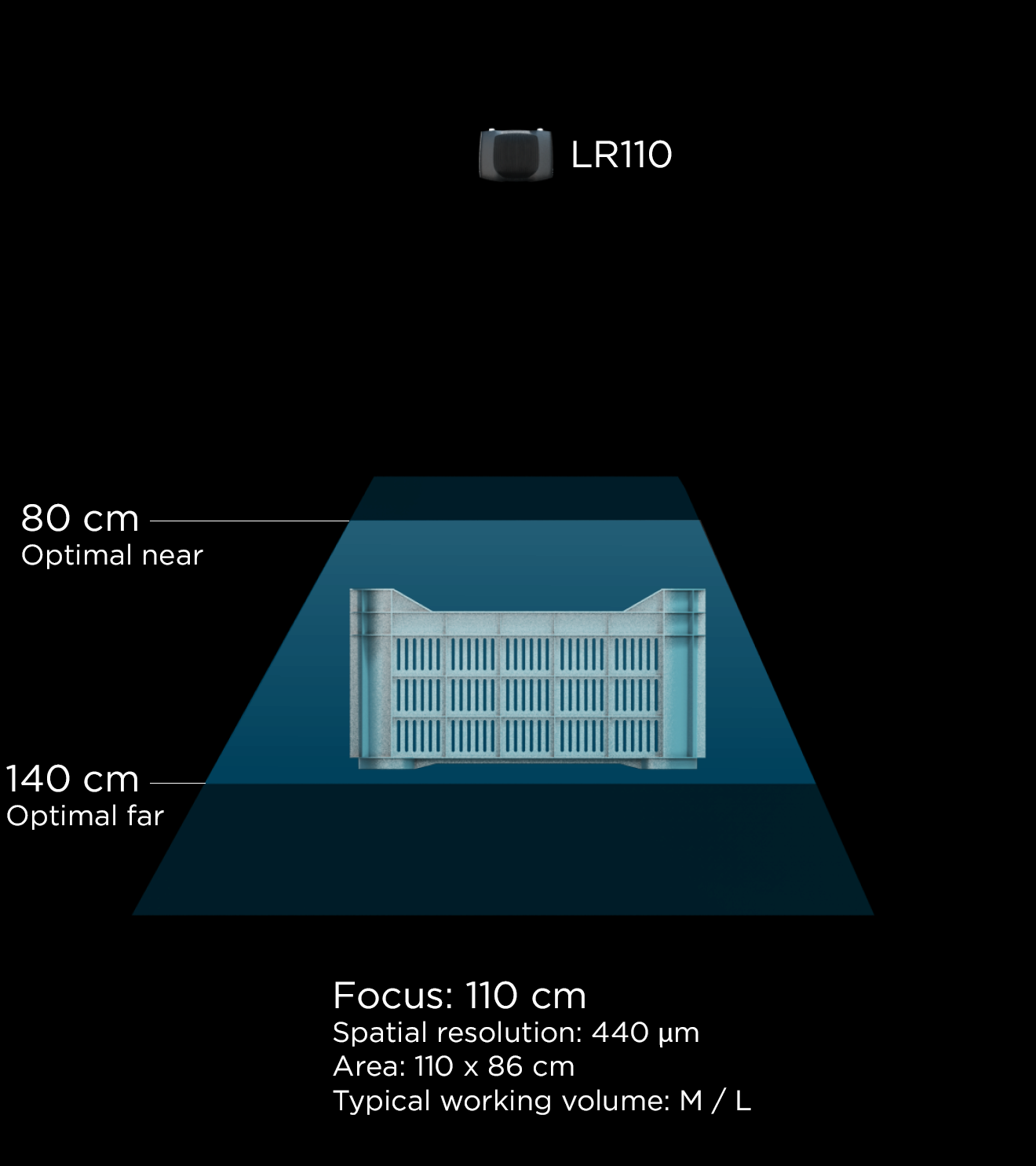
"Mujin managed to go from 700 to up to 1200 picks/h by switching to Zivid's newest model, the Zivid 2+ LR110" says Floris Gaisser, Computer Vision Sub-team lead at Mujin.
Watch the video →