

Stereo vision vs Zivid 3D
What is the difference between a low-cost consumer-grade 3D camera and an industrial-grade 3D color camera from Zivid?
![]() Interactive content by Flourish
Interactive content by Flourish
Many robotic bin- and piece picking applications have started their detect, pick and place algorithm development based on the data from low-cost depth cameras like e.g. the RealSense. And given its price point and availability, it's a great entry point to 3D imaging and capturing point clouds.
With the latest news on Intel "winding down this business", we want to express sincere gratitude to the Realsense team for paving the way in the industry and driving inspiring product innovation. At the same time; many companies are now exploring alternatives - here is how Zivid 3D sensing compares.
A 3D point cloud is the digital representation of our reality produced by a vision sensor. It's this point cloud that your system must use as input when calculating how to perform changes in the real world. A typical example is an automated solution for picking a box from a bin.
But the uncomfortable truth is that all 3D machine vision sensors introduce errors and uncertainties to the digital point cloud representation. When these errors are big enough, your solution will likely make mistakes. In our bin example, this means that we'll miss picking the box from the bin. If we can minimize these errors, our point clouds have a true representation of reality. High trueness means that your solution can successfully pick and place the box.
 |
 |
 |
 |
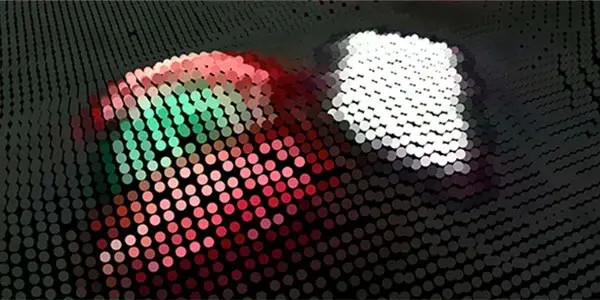
Stereo vision depth camera output |
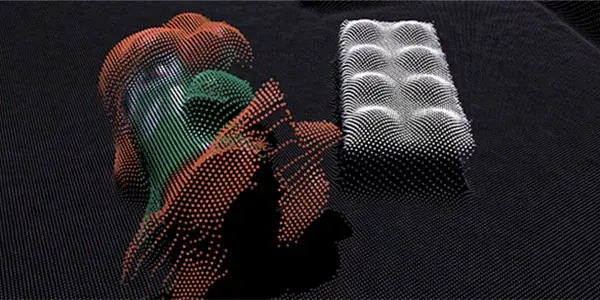
Zivid 3D camera output |
In short; trueness and real-life representation are the biggest difference between a stereo camera and a 3D color camera from Zivid. With the industrial 3D camera, you can trust the point cloud data (if you can see more, you can do more).
Now let's look at two boxes and some matchstick boxes captured with a stereo camera. As you can see, the point cloud data does not reflect the reality as we as humans would expect to see it.
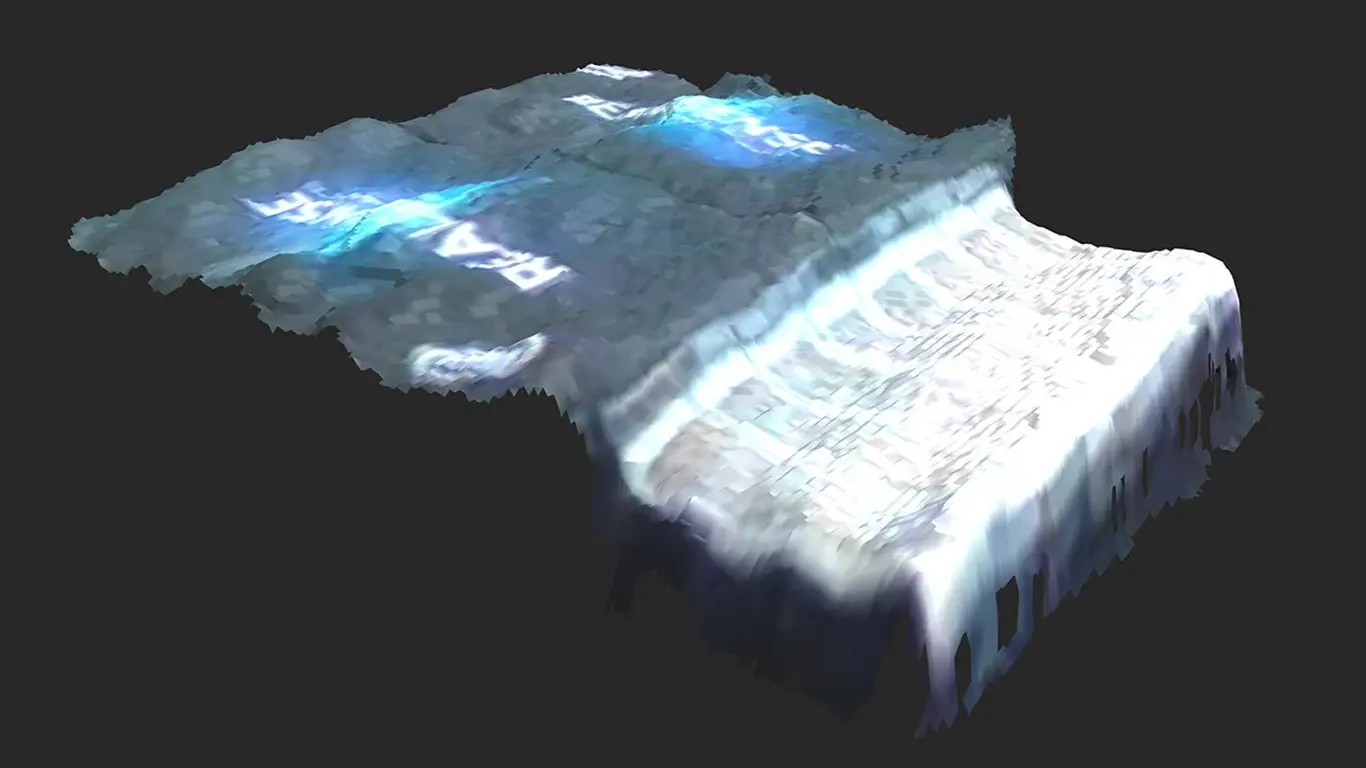
Stereo camera boxes as captured by a stereo camera.
Here you can see the point cloud of the boxes and match sticks boxes captured with an industrial Zivid 3D machine vision camera.
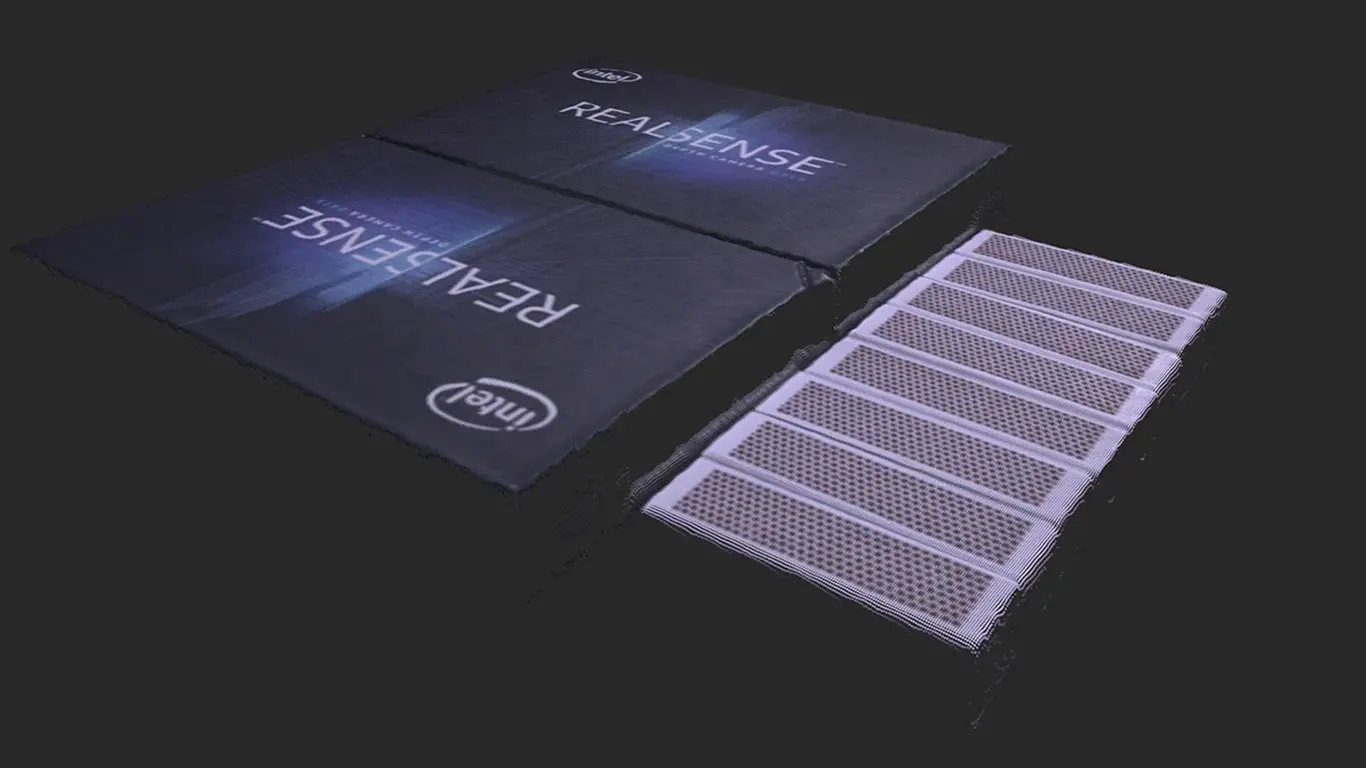
The same boxes captured by Zivid's industrial 3D color cameras.
Poor point clouds cause side effects
As a system designer, poor data requires us to make extraordinary adjustments;
- We must train our AI and ML algorithms on noisy data to adjust for the low-quality depth sensor output instead of a real-world representation.
- We will miss picks because the objects don't appear where they are supposed to be in our XYZ due to scaling, rotation, and translation errors in the depth sensor.
- We don't achieve high SKU coverage because there's a limit to which features our low-resolution depth camera can distinguish.
So the way to remove uncertainties, extra adjustments, and to trust the output, is simply to use an industrial robot vision camera in random bin-picking, pick and place, machine tending, or even robot welding applications. The result is that our automated machine vision solution will cover more SKUs, experience fewer mispicks, and empty more bins. And, you'll get more satisfied end customers!
Going further: the benefits of a robot-mounted camera set-up with Zivid

What's next?
- Check out more of the Zivid 3D and depth camera point clouds here.
- Want to dive deeper? Reach out for a demo and a talk with our vision engineers.
- Already convinced? We recommend ordering Zivid's industrial 3D developer kit.

High-end stereo vs Zivid 3D
A 3D camera that will not only survive the rigors of industrial deployment but will perform with reliable excellence, must be designed with quality in its DNA from the ground up for exactly that purpose.
 Interactive content by Flourish
Interactive content by Flourish
High-quality point clouds rule
Machine 3D vision deployments continue to rise dramatically and look set to do so for the next decade at least. The current growth is also seeing innovation across multiple domains that converge on the robot vision system. Machine Learning, AI and Deep Learning are all making more of an impression on how systems can improve on detection accuracy and efficiency.
The use of machine learning algorithms is helping but as with other areas of machine learning implementation, its ability to perform is dictated by the quality of data that is fed in. The quality of resolution, precision, trueness, and thus accuracy all influence these new innovative approaches. Great resolution, precision, and accuracy will amplify algorithmic approaches. Not so good may function, but it will never be 100% optimal.
Read more: How long does it take to receive your Zivid 3D color camera after ordering?
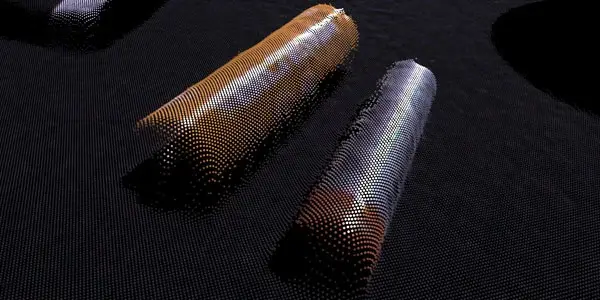
There are various different approaches to 3D vision on offer today. Zivid uses a sophisticated time-coded structured light approach, another method is using stereo vision techniques.
Can you spot the difference?



Zivid 2 3D point cloud quality
| Parameter | Details |
| Resolution | 2.3 megapixels XYZ, RGB, SNR |
| High dynamic range | 23 stops |
| Point precision | < 50 microns Equivalent to width of a human hair |
| Trueness error | < 0.2% Equivalent to 200 microns on a 10cm object or the width of grain of salt |
Zivid 2 industrial build quality
| Parameter | Details |
| Accelarated lifetime testing | 5000 hours 3 to 6 years of typical operation |
| Tests include (more in full test schedule) |
15G shock, 5G sinusoidal, over-temp, over-wattage, over photon exposure |
| Pre-delivery tests | 100+ hours and final calibration to specification |
So, these are laboratory-grade devices that are almost never deployed in a laboratory. In fact, quite the reverse, they deploy into noisy, vibration-ridden, hot and cold factories, assembly workshops, and logistic depots. Not ideal, is it?
We have designed Zivid 2 from the ground up to deploy with long-term reliability in an industrial setting. We carry out accelerated lifetime testing of 5000 hours and boy are we cruel to them during that time, but they gotta be tough enough, right?
We stretch over a specified temperature range, we cycle temperature wildly for extended periods, we drop them, knock them, and shock them. All the while we are measuring every parameter, every point in the field of view, looking for the slightest discrepancy. Only once we are satisfied with these tests are we ready to ship.
Before we ship a Zivid 2 to you, we bake, shake and test it for 100 hours to make sure it is fully mechanically settled, then we perform a perfect calibration. Then and only then do we send it to you, and we even package them in impact-resistant packaging, so it doesn’t get knocked out of balance on their way to you.
Going further: the benefits of a robot-mounted camera set-up with Zivid
What's next?
- Check out more of the Zivid 3D and depth camera point clouds here.
- Want to dive deeper? Reach out for a demo and a talk with our vision engineers.
- Already convinced? We recommend ordering Zivid's industrial 3D developer kit.