自动分拣抓取
用于装配、机床上下料和零件分类的制造自动化

提升物体识别能力
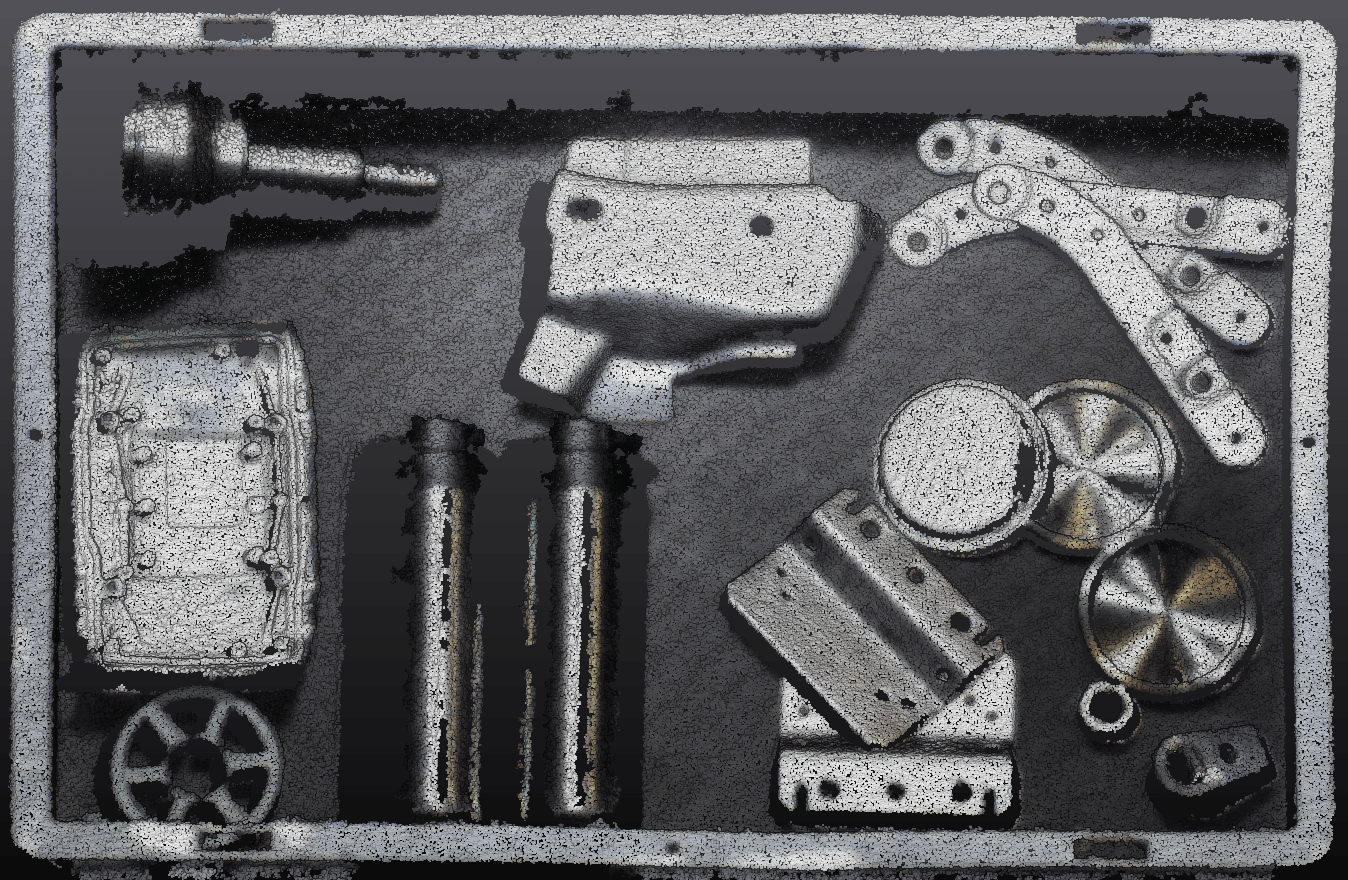
通过高分辨率、高精度的原生三维点云,机器人能够增强物体识别能力,检测出更多零件。
可靠的三维抓取精度
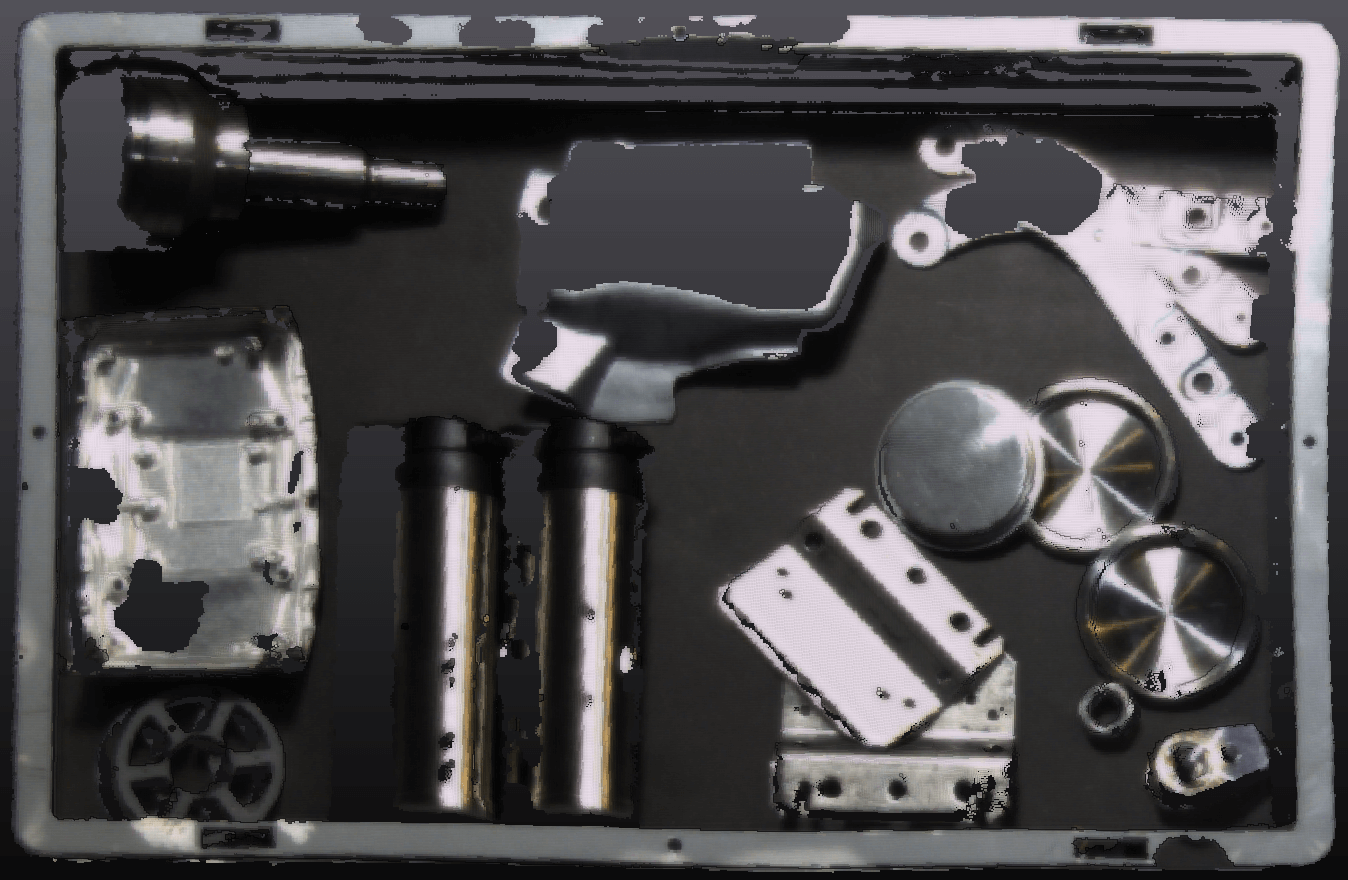
三维视觉通过精确捕捉物体的尺寸、朝向和绝对位置,实现可靠的物体边界识别。
精准放置与定位
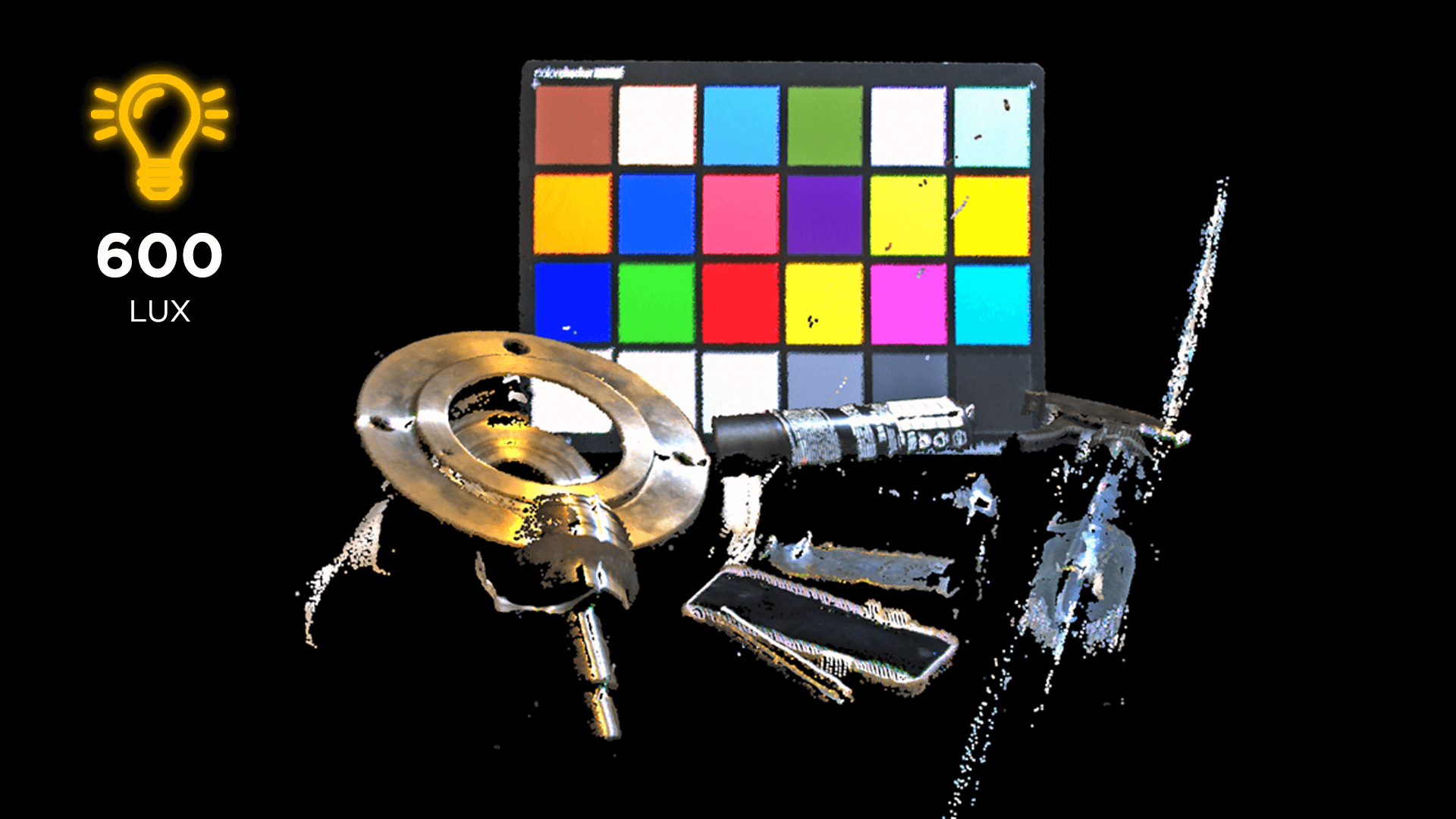
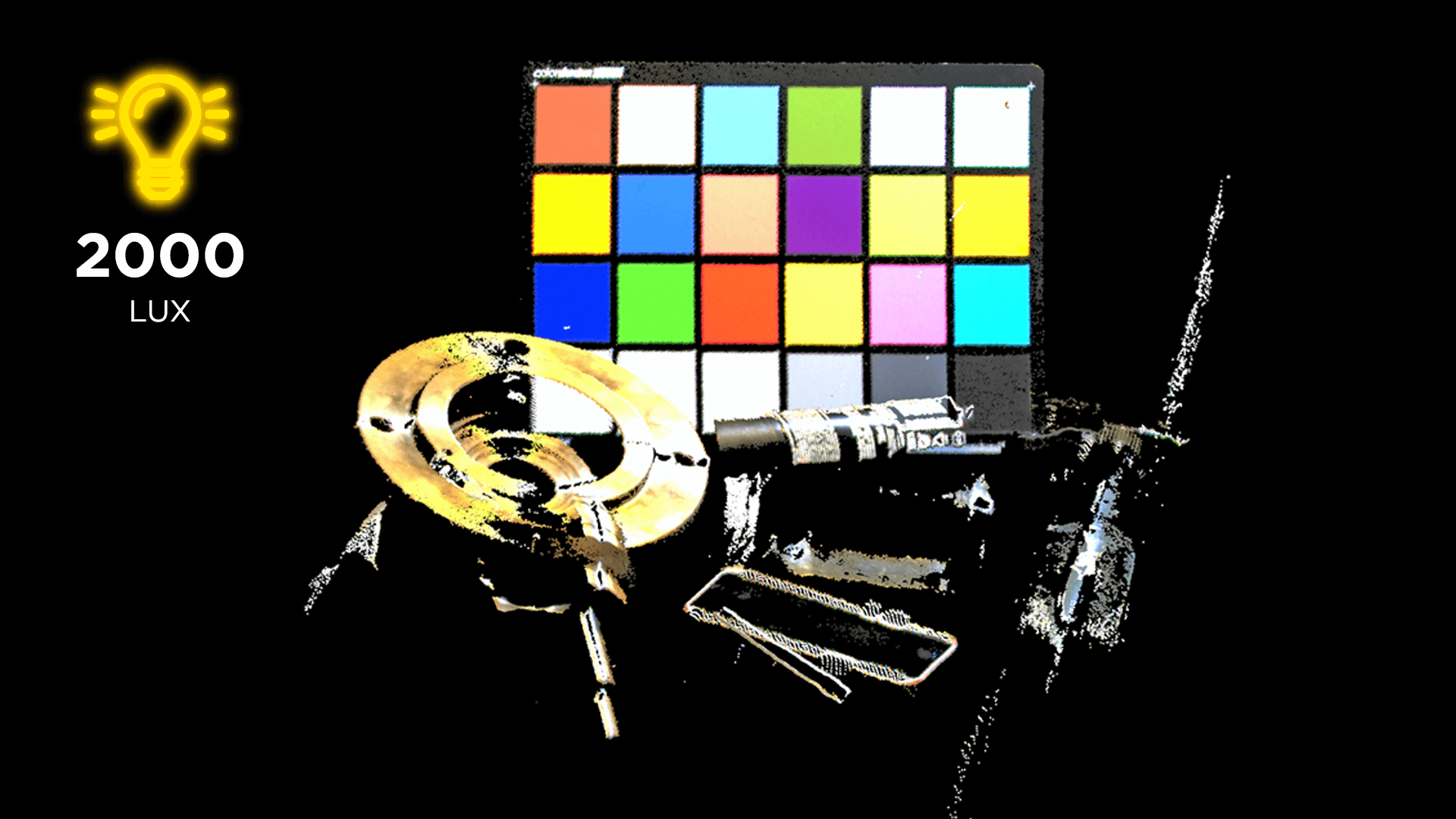
视觉引导的机器人能够精确执行取放任务,确保零件的准确放置与方向,同时避免碰撞和损坏。
.png?hsLang=zh-cn)





为什么 Zivid 3D 相机非常适合制造自动化?
我们的应用工程师 German 深入探索了 Zivid 2+ R 系列 3D 相机如何为制造任务(如分拣抓取、机床上下料、装配以及机器人表面处理)带来高精度与高适应性。
ING Robotics' all-in-one 3D vision solution for manufacturing
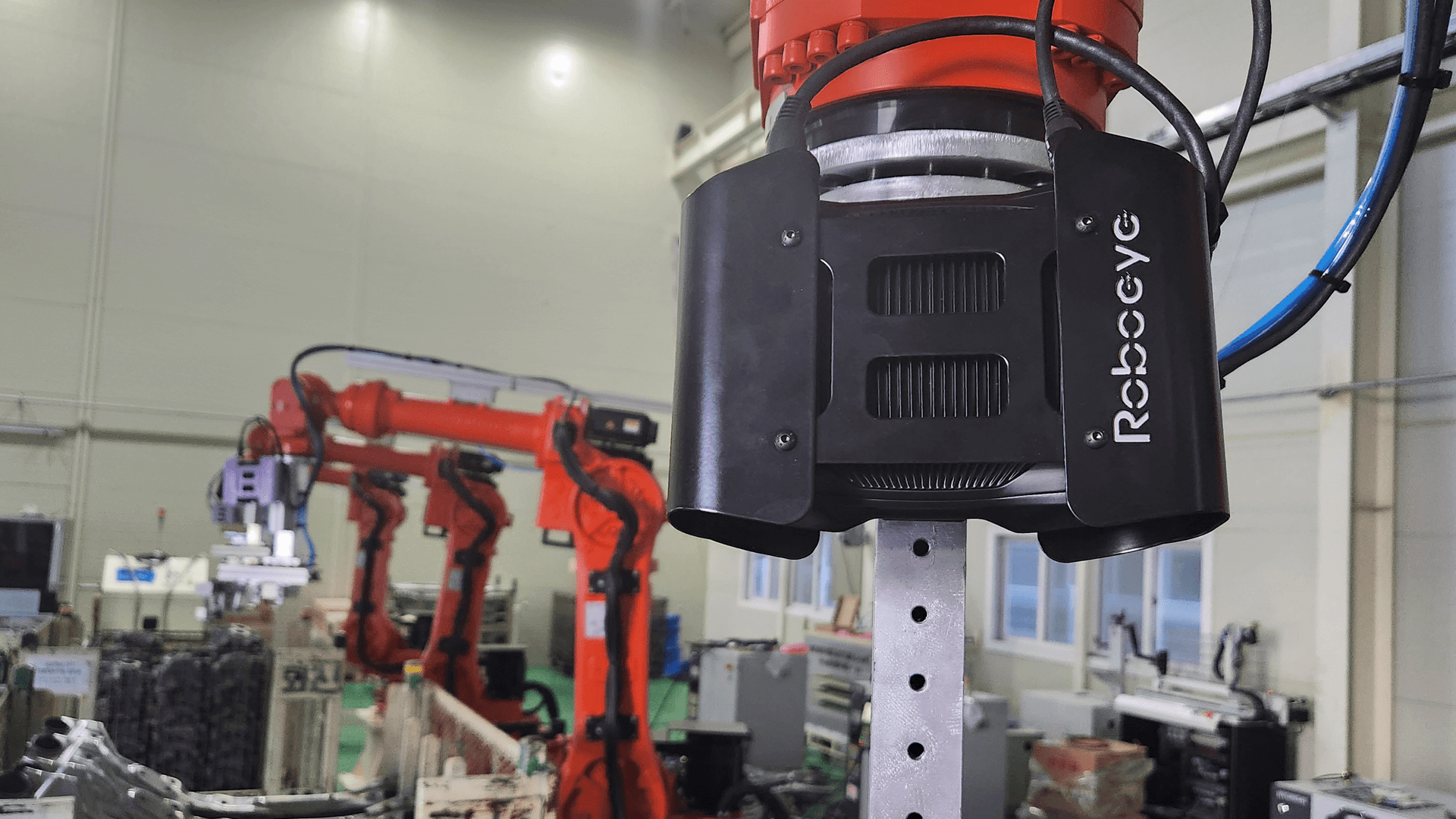
ING Robotics' all-in-one 3D vision solution for manufacturing
ING Robotics introduced ROBOEYE, a 3D vision solution combining the Zivid 2+ L110 3D for precision assembly automation
Innodura's complex parts hanging solution for assembly lines
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
Innodura's complex parts hanging solution for assembly lines
Hanging parts for processing is a task that has been primarily carried out manually, and automating it has proven to be a real challenge.
Plaif's appliance manufacturing solution
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)
Plaif's appliance manufacturing solution
Plaif has leveraged advances in AI and 3D machine vision to bring a high-reliability solution in appliance manufacturing.