
ビンピッキング
組立、マシンテンディング、部品仕分けのための製造自動化

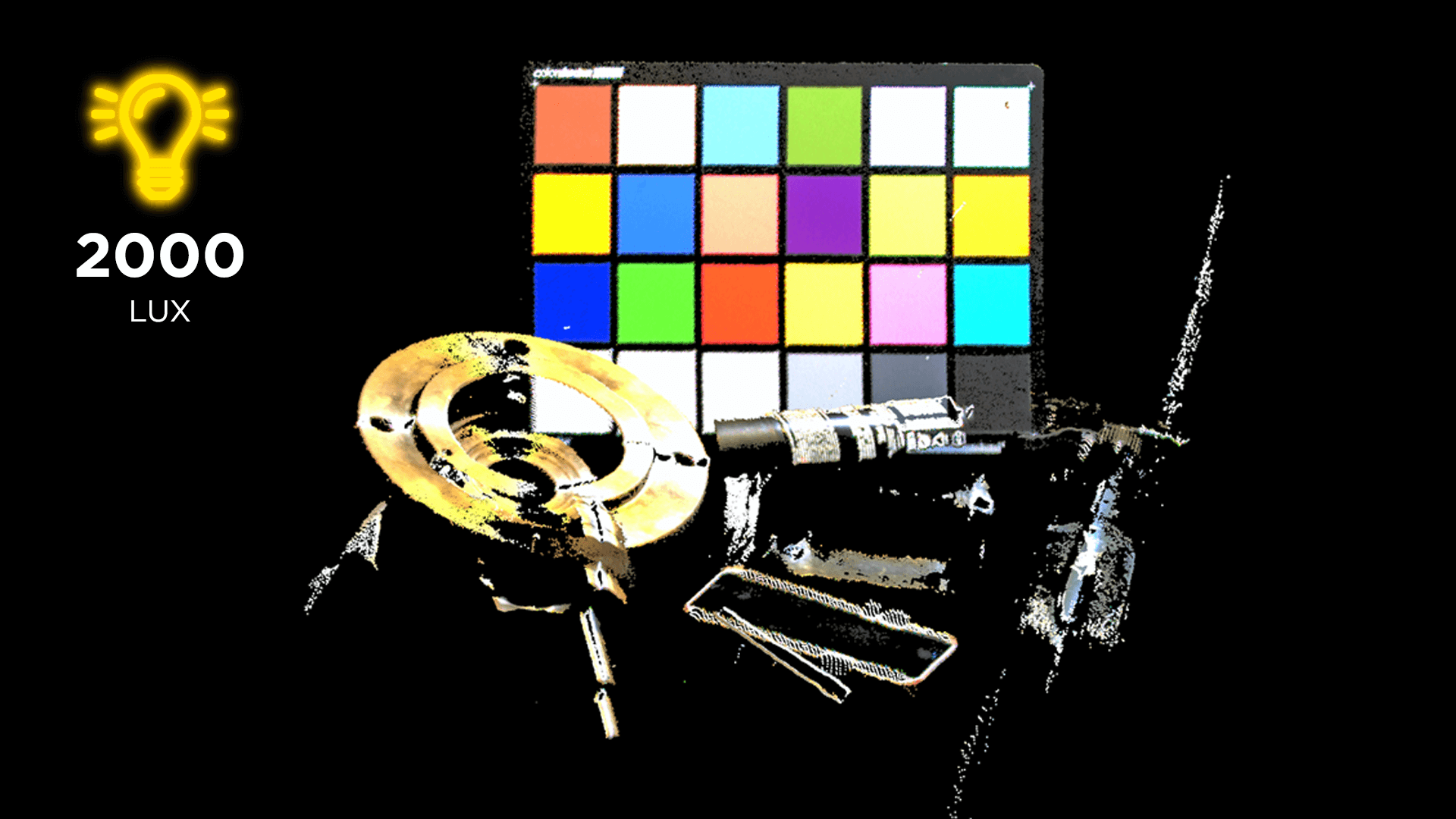
物体認識の向上
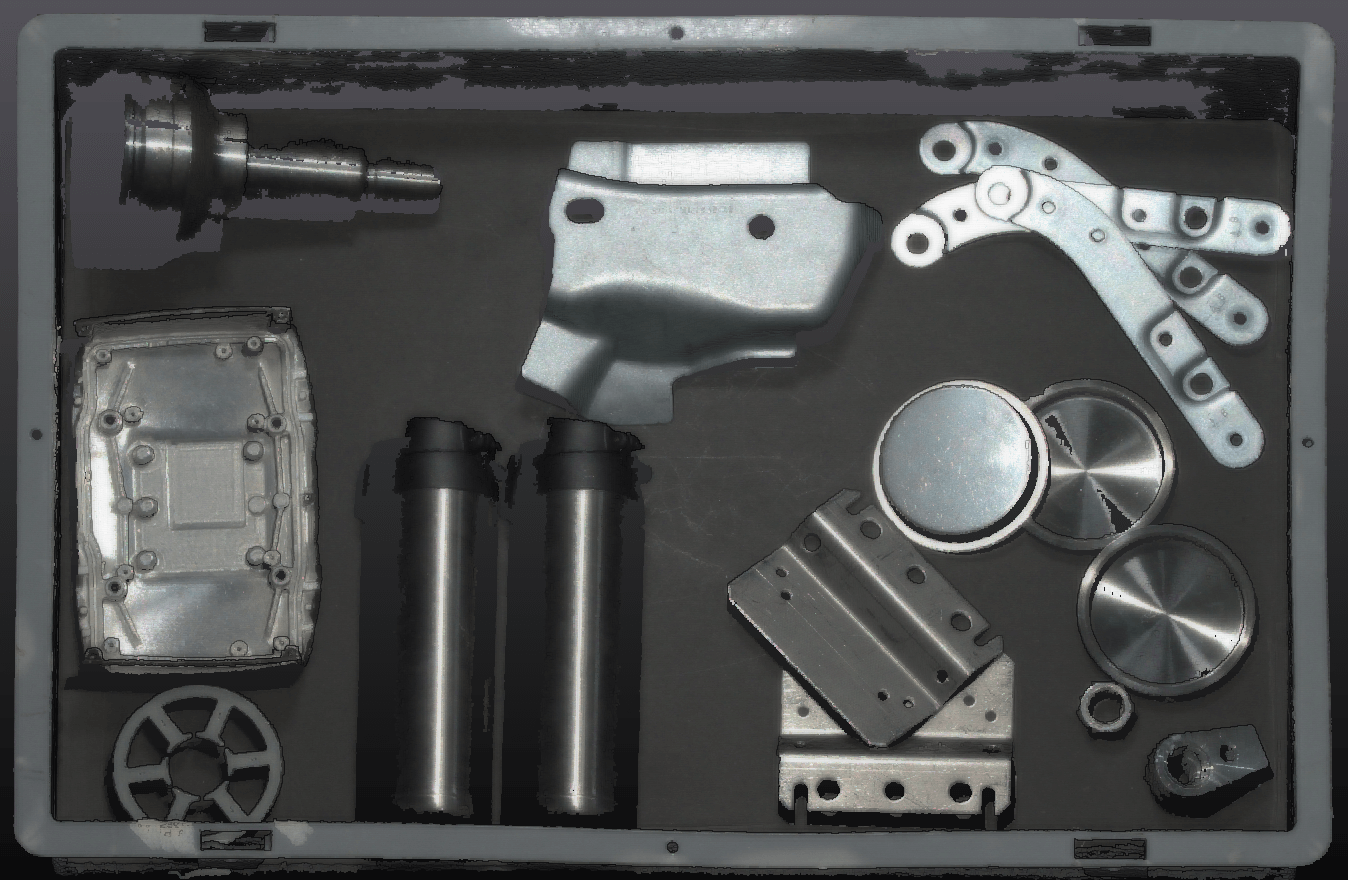
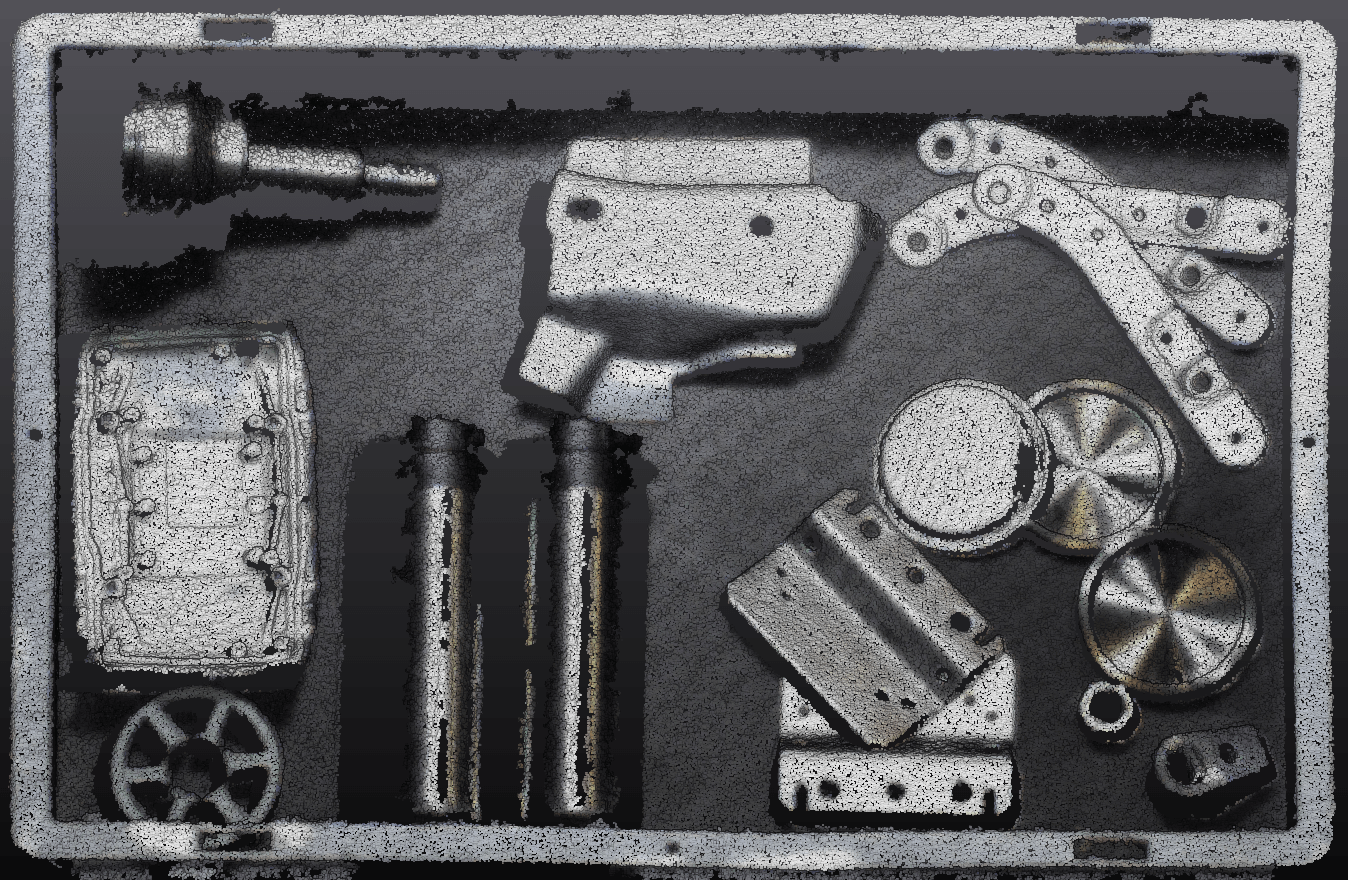
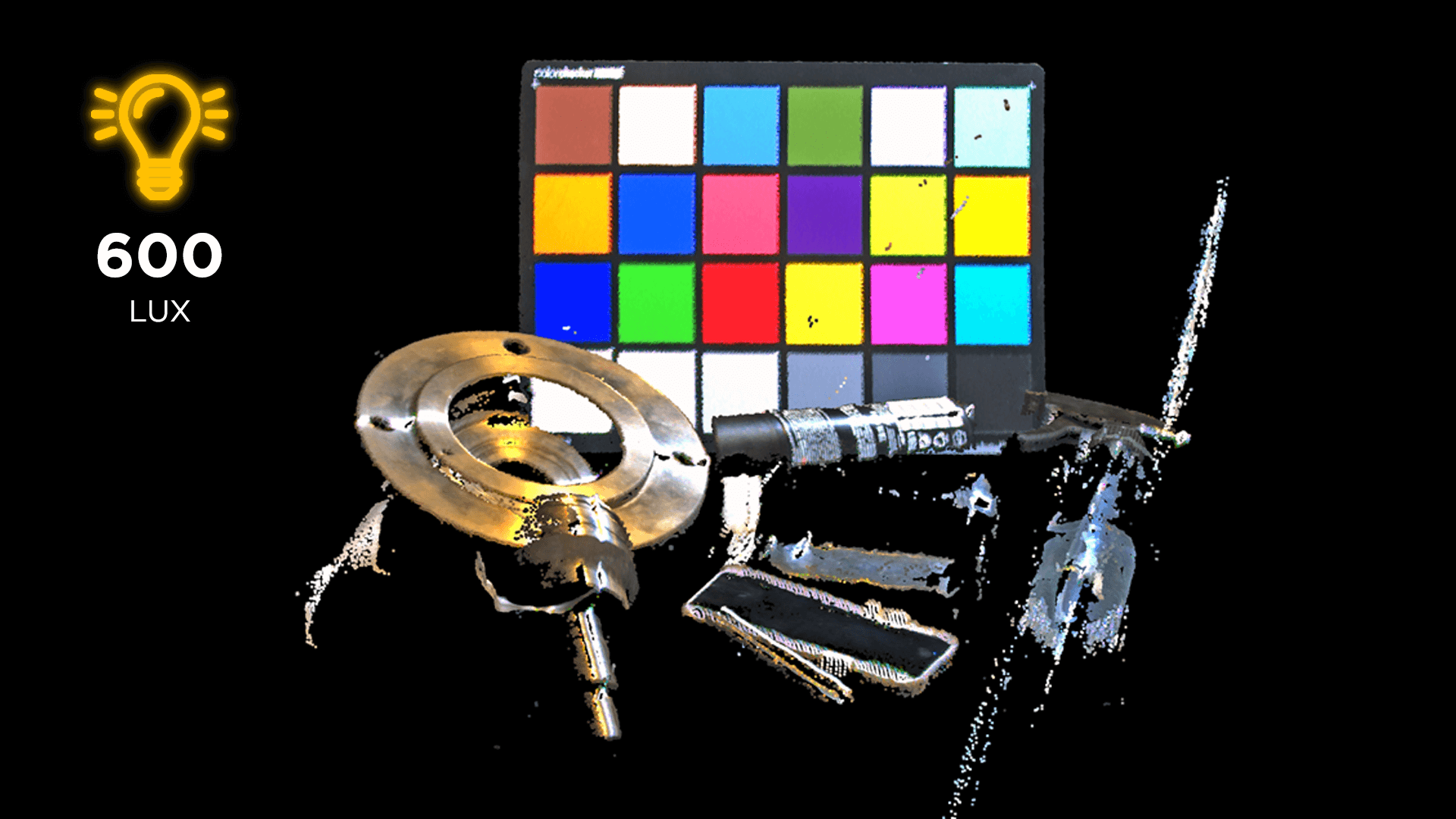
高解像度で超精密なネイティブ3D点群により、ロボットは物体認識を強化し、より多くの部品を検出することができる。
信頼性の高い3Dピッキング精度
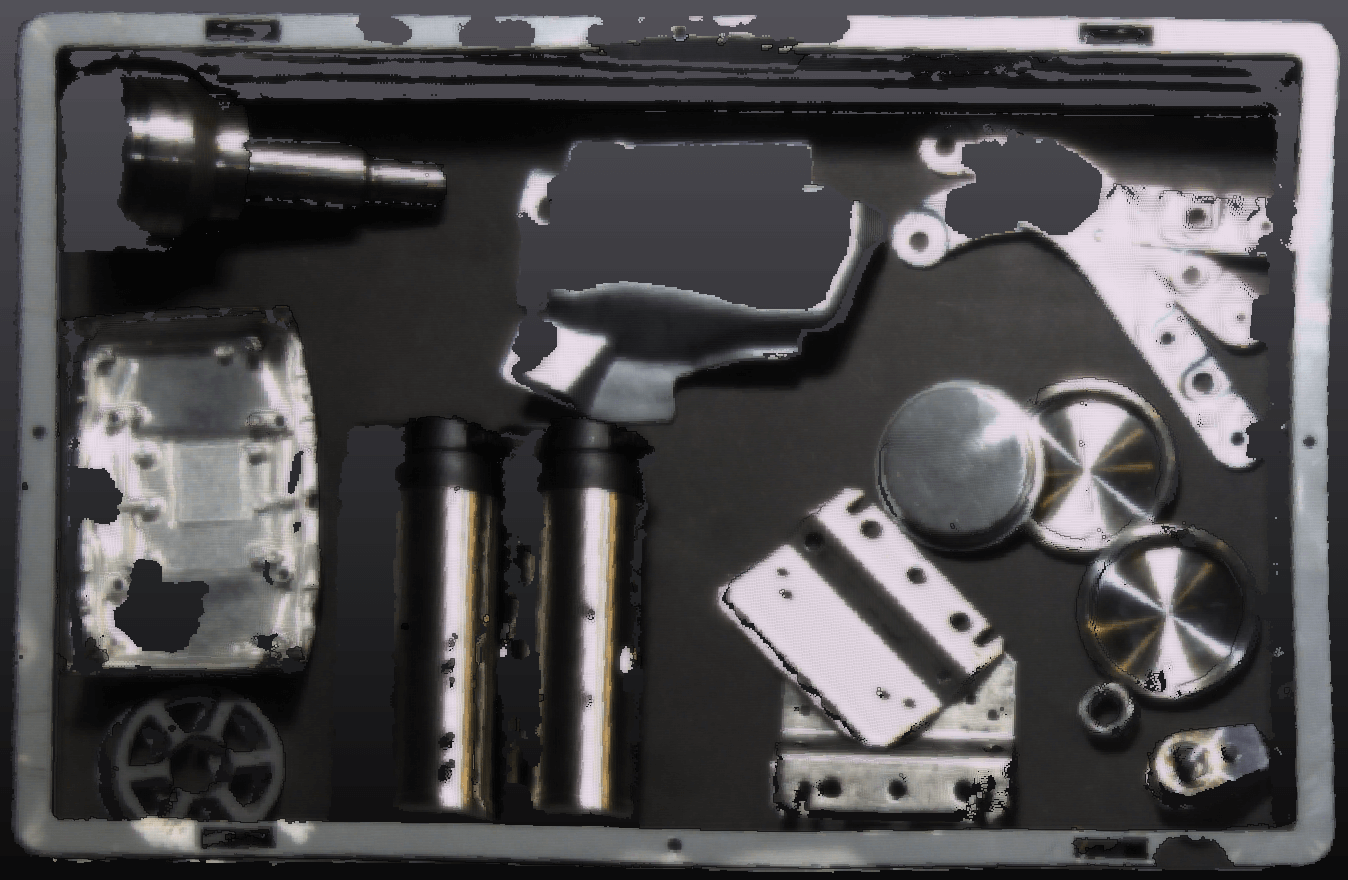
3Dビジョンは、物体のサイズ、向き、絶対位置を正確に捉えることで、信頼性の高い物体境界認識を可能にします。
正しい配置と向き
ビジョンガイドロボットは、衝突や損傷を避けながら正確な配置と向きを確保し、精密なピックアンドプレース作業を行うことができます。
.png?hsLang=ja)





Zivid 3Dカメラが製造自動化に最適な理由
当社のアプリケーションエンジニア、ジャーマンが、Zivid 2+ Rシリーズ3Dカメラが、ビンピッキング、マシンテンディング、組立、ロボット表面仕上げなどの製造タスクに、いかに高精度と汎用性をもたらすかをご紹介します。
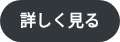
ING Roboticsの製造業向けオールインワン3Dビジョンソリューション
ING Roboticsの製造業向けオールインワン3Dビジョンソリューション
ING Roboticsは、精密組立自動化のためのZivid 2+ L110 3Dを組み合わせた3Dビジョンソリューション、ROBOEYEを発表しました。
Innoduraの組立ライン用複雑部品吊りソリューション
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
Innoduraの組立ライン用複雑部品吊りソリューション
加工用の部品を吊り下げる作業は、主に手作業で行われており、自動化は本当に難しい作業であることが証明されています。
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)