

Zivid 2+LR110
Best in class industrial 3D+2D camera with a large FOV and
working volume for a wide range of applications.

Warehouse piece picking
for multi-bins
The Zivid 2+ LR110 stands out with its large field of view and its ability to observe two bins simultaneously. Segment objects, get positions, check collisions, and plan your next placement.
This makes the Zivid 2+ LR110 a cost-effective and lean solution, streamlining operations and reducing the need for additional sensors. Despite the typical compromises of a larger field of view, get fast and exceptional point clouds for dense picking and packing.

Big bin picking in factories
Get high throughput with fast capture times and a field-of-view optimized for seeing large working volumes from a close distance. The robot-mounted Zivid 2+ LR110 is ideal for picking automotive parts with minimal motion and cycle time penalty. Its rugged design, low occlusion, and exceptional handling of reflections and other point cloud artifacts ensure top performance.

Robot-mounted depalletizing
A robot-mounted Zivid 2+ LR110 solution excels in depalletizing mixed items, including transparent objects like water bottles. You only need a single camera to cover multiple pallets, reducing costs and complexity. The proximity of the camera ensures superior 2D images and point clouds, leading to consistent and reliable picking. With its fast capture times, the Zivid 2+ LR110 makes high speed robot-mounted depalletizing possible.

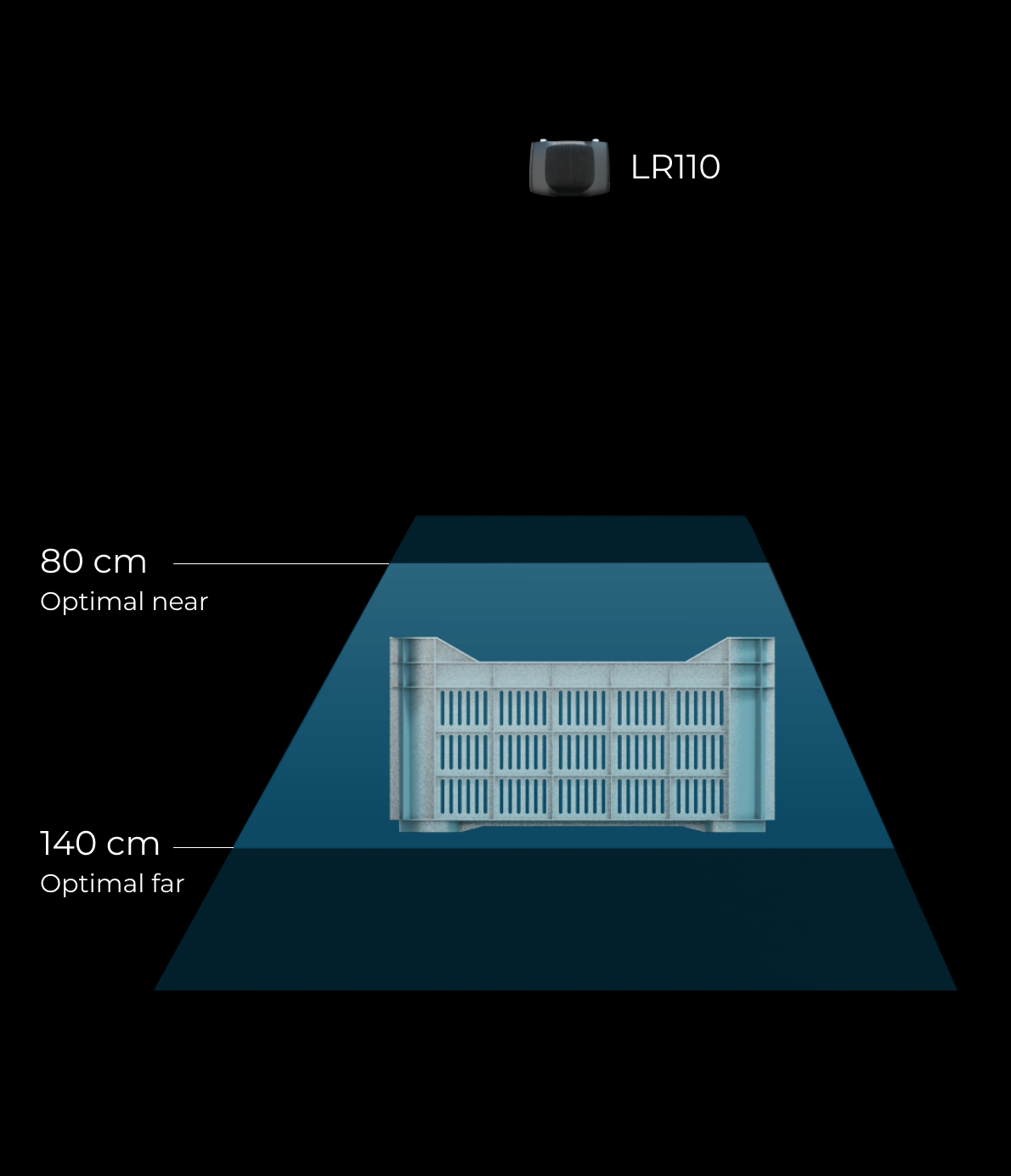
Optimized for robot arm mounting, Zivid 2+ LR110 offers a large scanning volume with dense, accurate 3D point clouds, unveiling pallets, large bins or even multiple totes in a single shot.
The focus distance of 110 cm has been carefully selected to match the clearance required for long grippers and end effectors, allowing for accurate and efficient bin picking and depalletizing tasks.


Order the Zivid 2+ LR110 now

