Zivid 2+LR110
최고의 성능을 자랑하는 산업용 3D+2D 카메라
넓은 시야각(FOV)과 작업 범위를 갖추어 다양한 응용 분야에 적합합니다.

멀티 빈용 창고 피킹
Zivid 2+ LR110은 넓은 시야각과 두 개의 빈을 동시에 관찰할 수 있는 기능이 돋보이는 제품입니다. 물체를 세분화하고, 위치를 파악하고, 충돌을 확인하고, 다음 배치를 계획할 수 있습니다.
따라서 Zivid 2+ LR110은 비용 효율적이고 간결한 솔루션으로, 운영을 간소화하고 추가 센서의 필요성을 줄여줍니다. 시야각이 넓음에도 불구하고 조밀한 피킹과 포장을 위해 빠르고 탁월한 포인트 클라우드를 얻을 수 있습니다.

공장에서의 대형 빈 피킹
빠른 캡처 시간과 가까운 거리에서 많은 양의 작업물을 볼 수 있도록 최적화된 시야각으로 높은 처리량을 확보하세요. 로봇에 장착된 Zivid 2+ LR110은 동작과 사이클 시간 저하를 최소화하면서 자동차 부품을 피킹하는 데 이상적입니다. 견고한 디자인, 낮은 오클루전, 반사 및 기타 포인트 클라우드 아티팩트에 대한 탁월한 처리 능력으로 최고의 성능을 보장합니다.

로봇 장착형 디팔렛타이징
로봇에 장착된 Zivid 2+ LR110 솔루션은 물병과 같은 투명한 물체를 포함한 혼합 품목의 디팰렛화에 탁월한 성능을 발휘합니다. 카메라 한 대만 있으면 여러 팔레트를 처리할 수 있어 비용과 복잡성을 줄일 수 있습니다. 카메라가 근접해 있어 우수한 2D 이미지와 포인트 클라우드를 확보할 수 있어 일관되고 안정적인 피킹이 가능합니다. 캡처 시간이 빠른 Zivid 2+ LR110은 로봇에 장착된 고속 디팔레타이징을 가능하게 합니다.

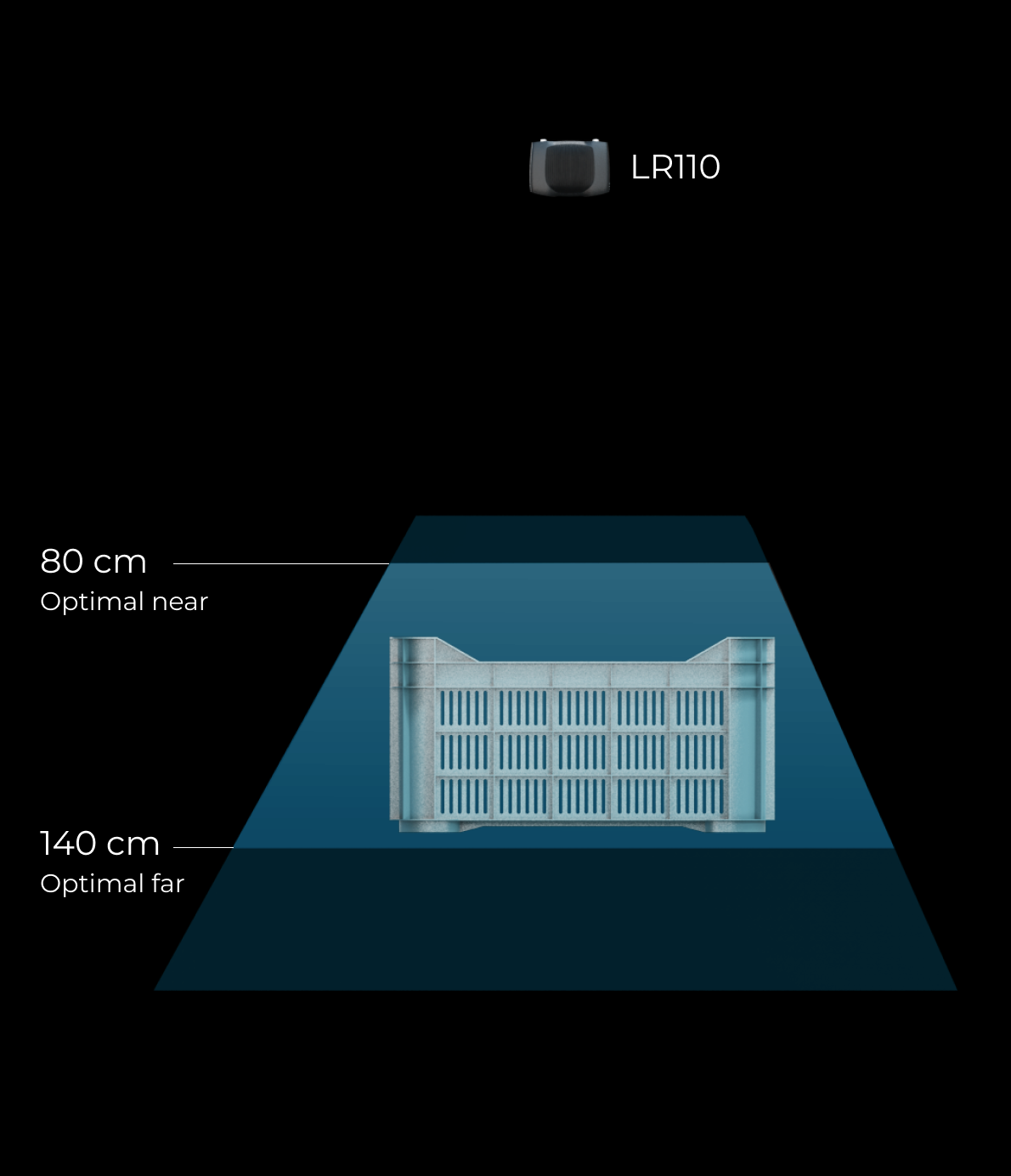
로봇 암 장착에 최적화된 Zivid 2+ LR110은 조밀하고 정확한 3D 포인트 클라우드가 포함된 대용량 스캔을 제공하여 팔레트, 대형 빈 또는 여러 개의 토트를 한 번에 스캔할 수 있습니다.
110cm의 초점 거리는 긴 그리퍼와 엔드 이펙터에 필요한 간격에 맞게 신중하게 선택되어 정확하고 효율적인 빈 피킹 및 디팰릿화 작업을 가능하게 합니다.


지금 Zivid 2+ LR110 주문하기

