Automated Assembly
Pick, Place, Align, and Fasten for Efficient Manufacturing Automation

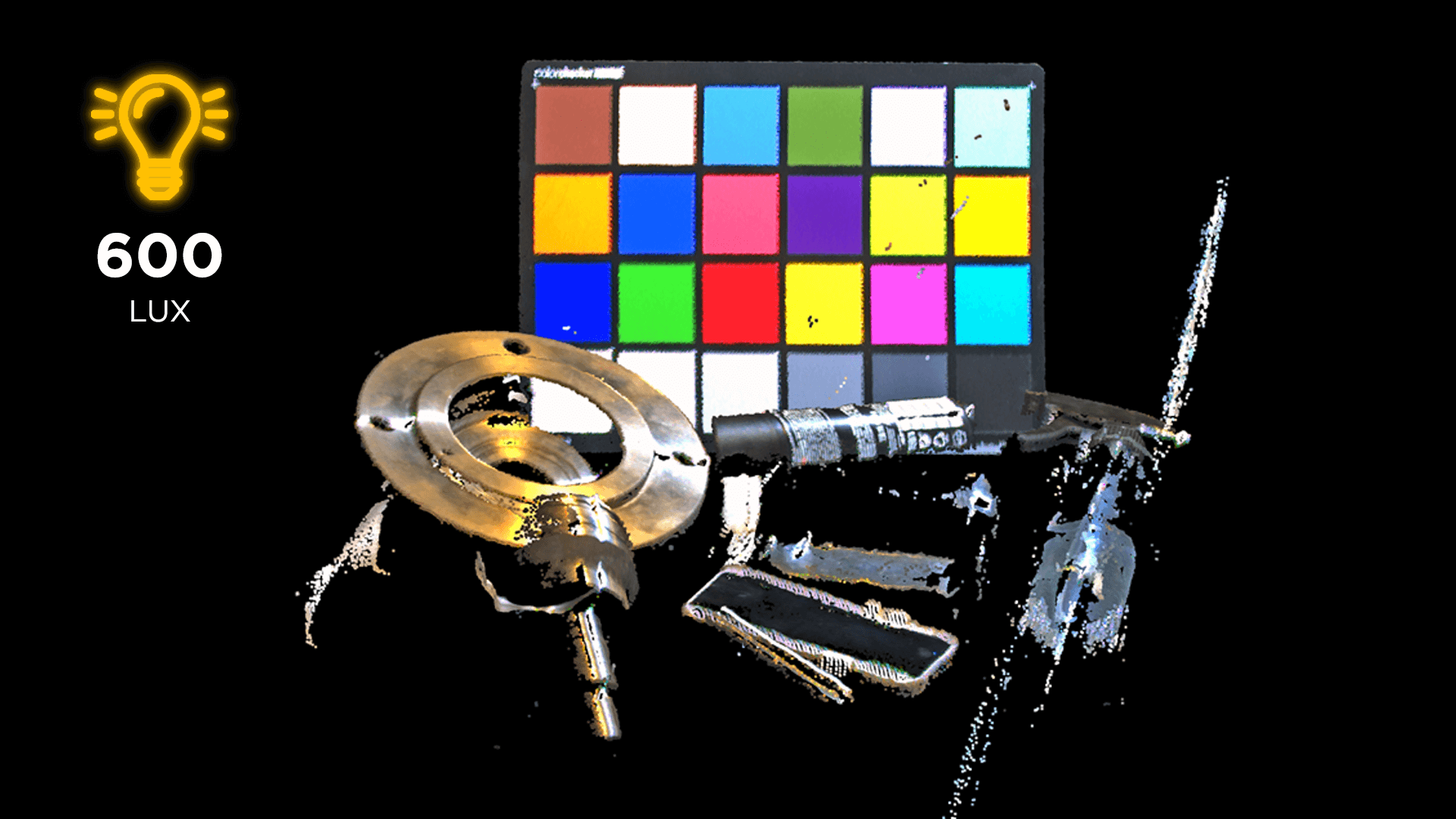
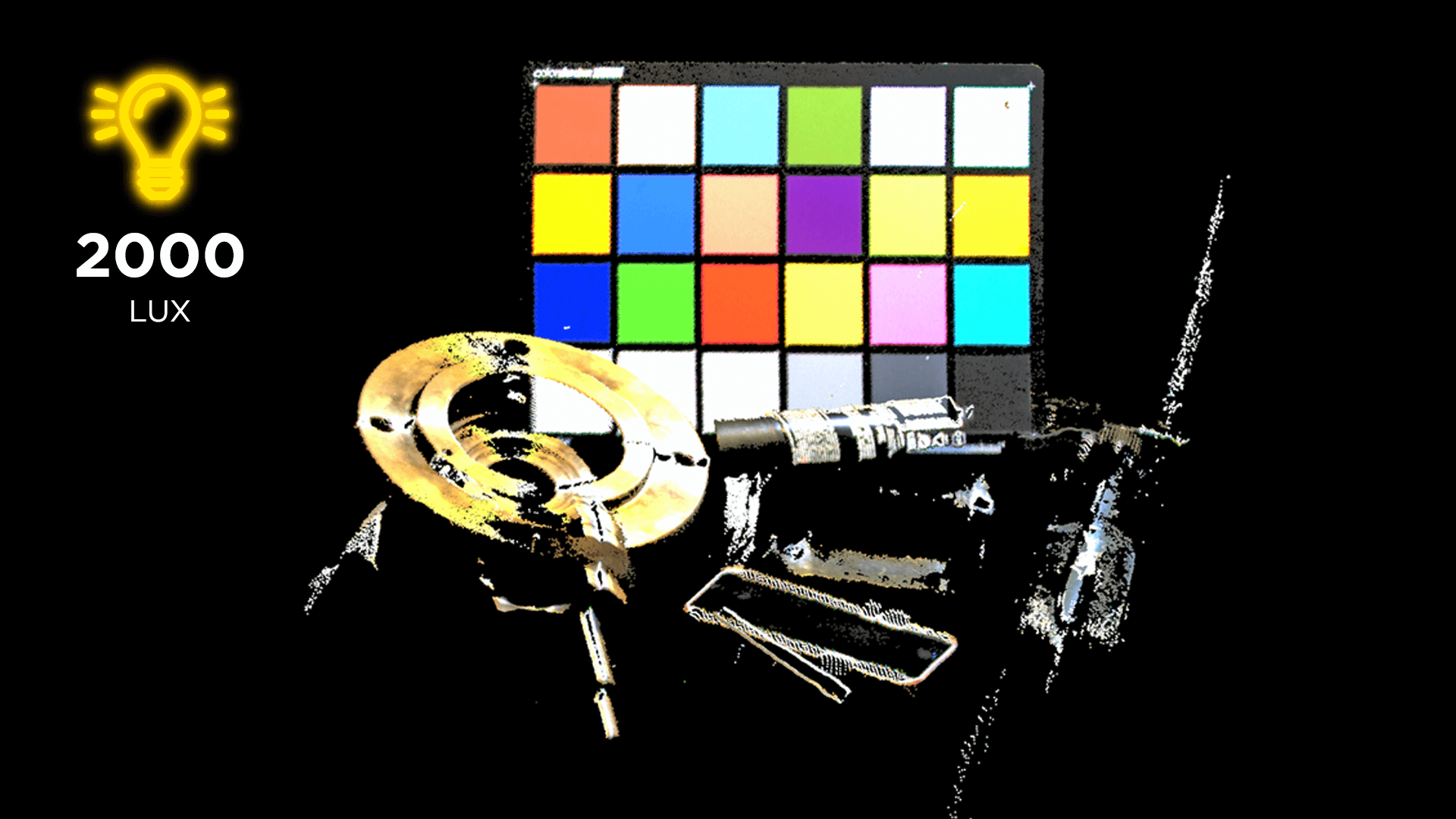
Capture every detail
A 3D vision camera captures highly detailed, accurate, and complete point clouds, even for small, reflective, and complex assembly parts.
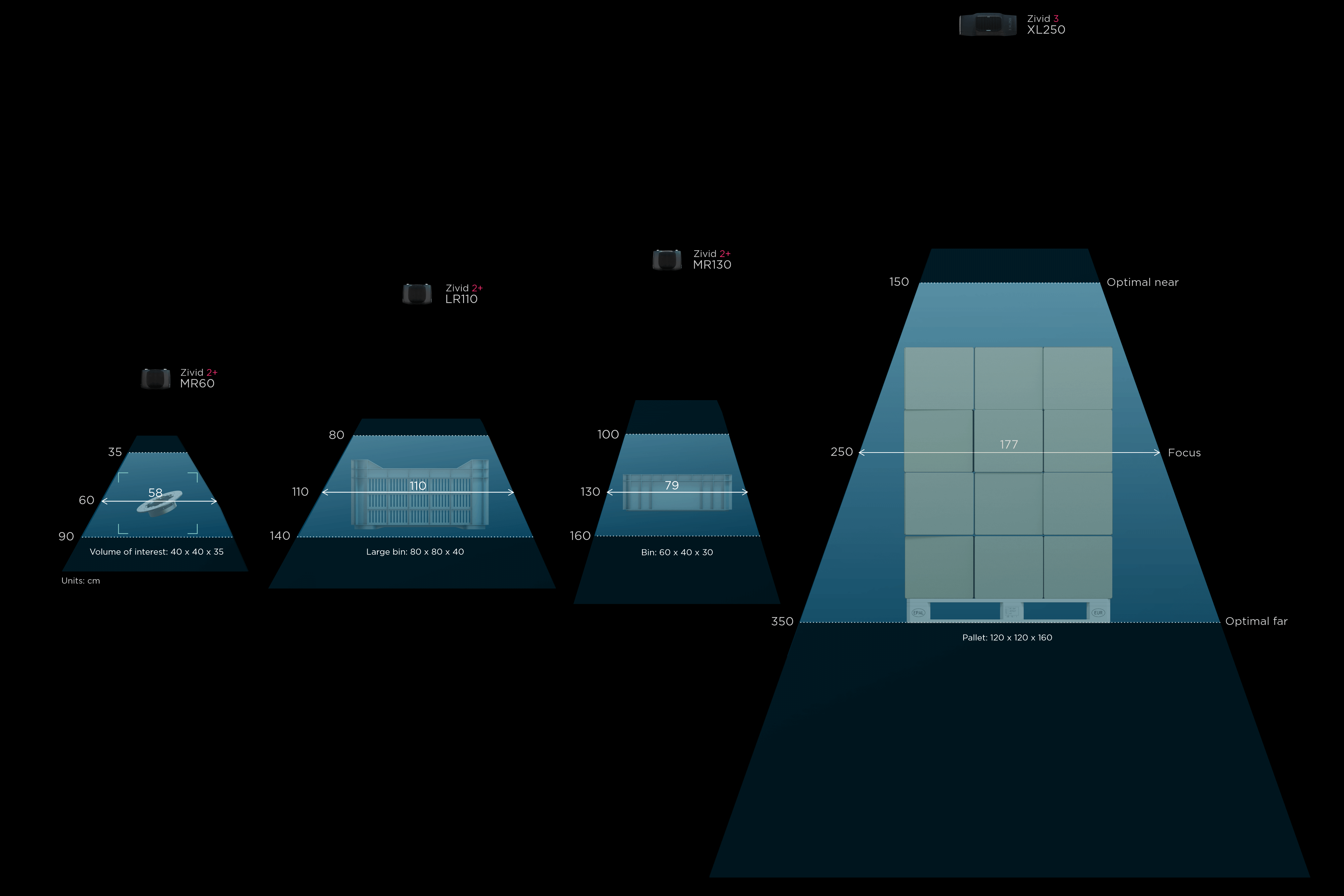
Flexible positioning

Placing the 3D camera at the optimal distance and angle improves capture quality and allows the robot to operate across multiple workspaces.
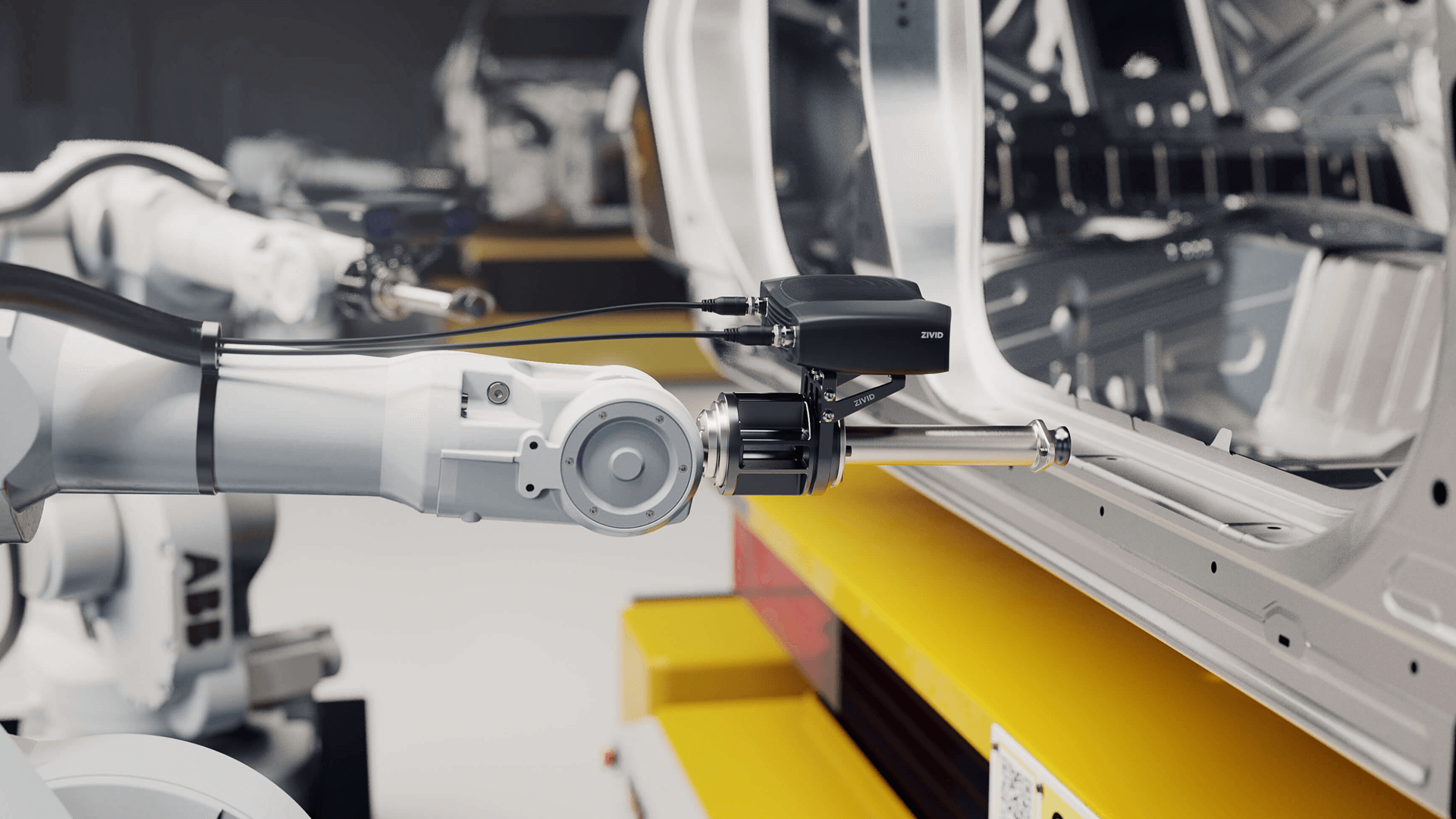
Reliable in industrial environments

Industrial-grade 3D vision cameras provide consistent performance, both in demonstration cells and in demanding manufacturing settings.
%20(1).png?hsLang=en)
.png?hsLang=en)




Why Zivid 3D Cameras Are Perfect for Manufacturing Automation?
Our Application Engineer, German, discovers how Zivid 2+ R-Series 3D cameras bring high precision and versatility to manufacturing tasks like bin-picking, machine tending, assembly, and robotic surface finishing.

Automotive assembly with CMES
Automotive assembly with CMES
CMES fuse deep learning with 3D machine vision to change the face of automotive assembly.
Innodura's complex parts hanging solution for assembly lines
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
Innodura's complex parts hanging solution for assembly lines
Hanging parts for processing is a task that has been primarily carried out manually, and automating it has proven to be a real challenge.
Plaif's appliance manufacturing solution
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)
Plaif's appliance manufacturing solution
Plaif has leveraged advances in AI and 3D machine vision to bring a high-reliability solution in appliance manufacturing.