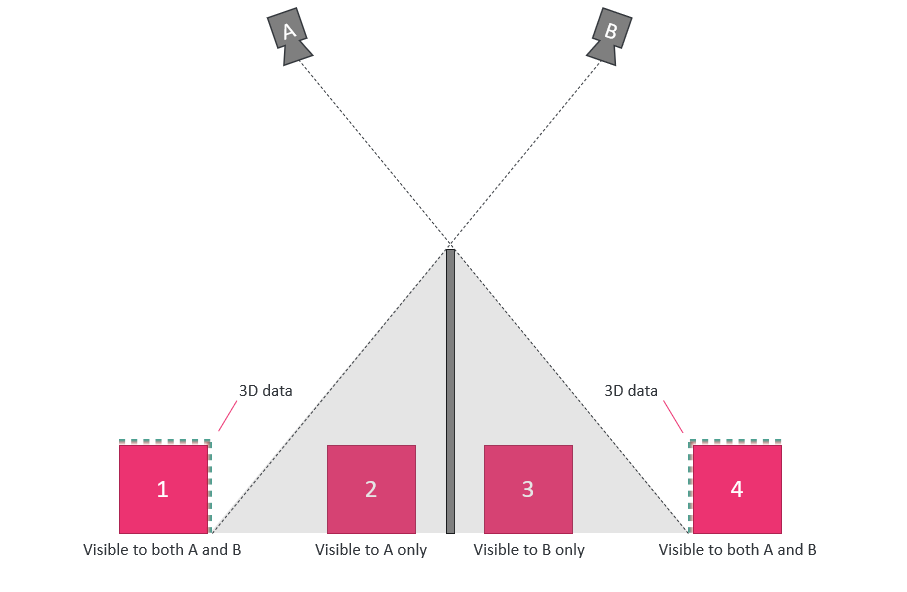
Occlusion occurs due to the relative placement of projector/camera and camera, creating "blind spots" (shadow areas) in our target scene. This causes a loss of scene details and hence negatively affecting 3D image quality.
Occlusion is directly proportional to the camera's baseline and becomes very prevalent on smaller objects with relatively large features in the Z-axis (towards the camera). A larger baseline camera reduces the overlapping region that both cameras or camera/projector can detect, while a small baseline camera increases it.
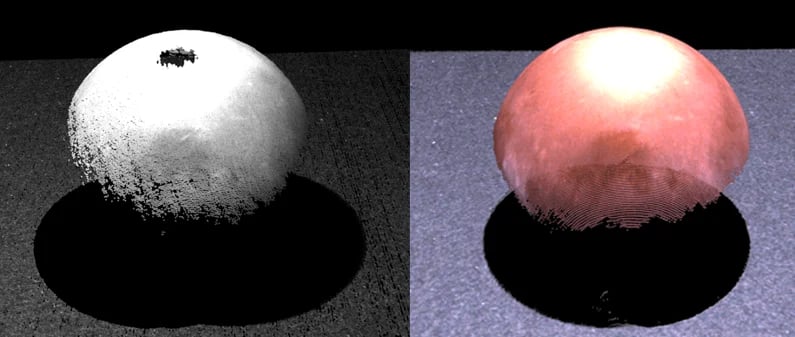
Point cloud examples: 3D laser scanner with missing data (left) vs. Zivid 3D camera (right)
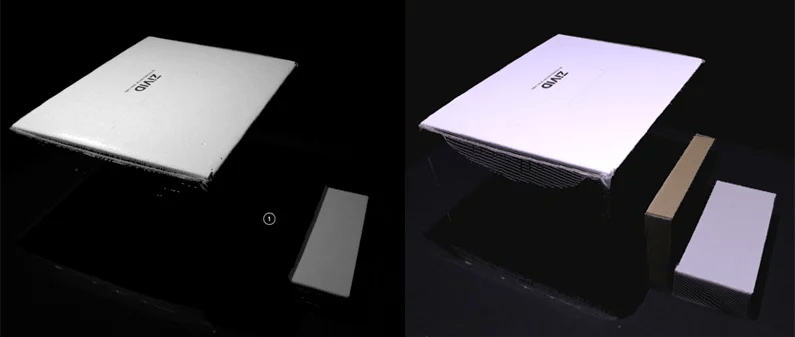
Point cloud examples: 3D laser sensor (left) vs. Zivid 3D camera (right)
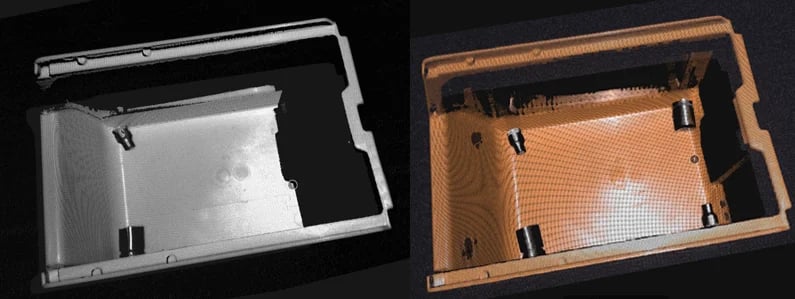
Point cloud examples: Laser 3D camera (left) vs. Zivid 3D camera (right)
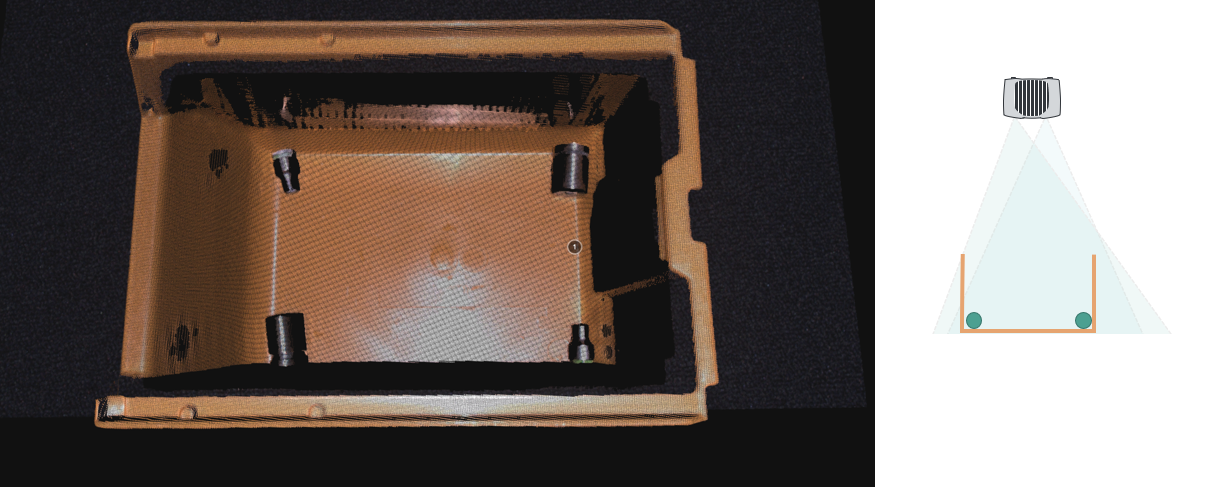
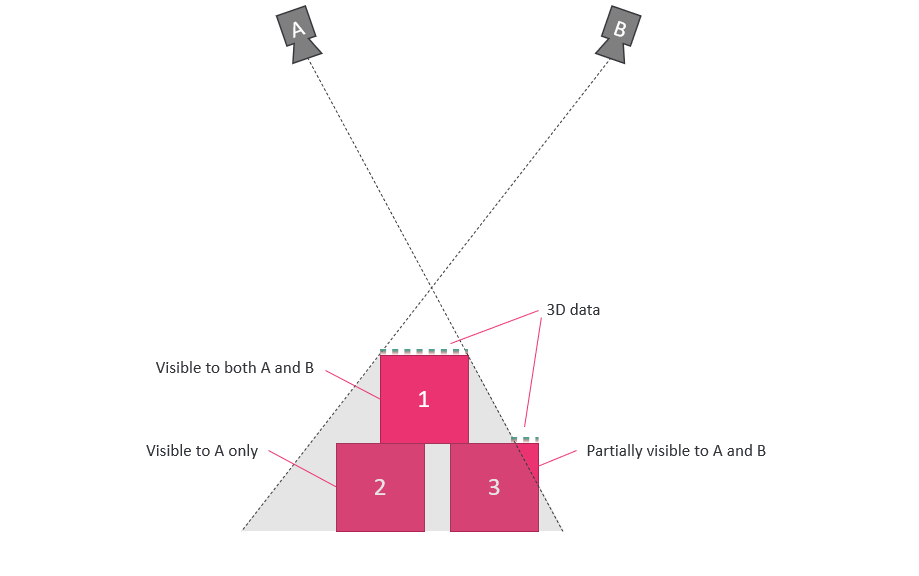
Almost all objects in a scene will create some shadow areas. The taller the object is, the longer its shadow will be cast, increasing the shadow area where other objects can be hidden. The shadow's length is also dependent on the distance from camera to camera/projector (baseline), and a larger baseline will lead to larger shadows.
Some objects to be forever “hidden” behind a permanent shadow, e.g., created by a bin wall, such that the bin-picking program can never empty the bin without help.
Fewer addressable objects and preferred pick-points to be identified.
Loss of details and point cloud coverage of an object, resulting in impaired or failed detection.
Zivid One+ and Zivid 2 3D cameras are designed for reducing challenges in bin-picking and pick and place applications. The small baseline gives higher pixel coverage, which is especially relevant for small parts. With Zivid cameras, robots can better see smaller objects, such as shiny cylinders with smaller diameters than other 3D cameras with a larger baseline.
A large baseline - loss of scene details, creating holes, and missing data
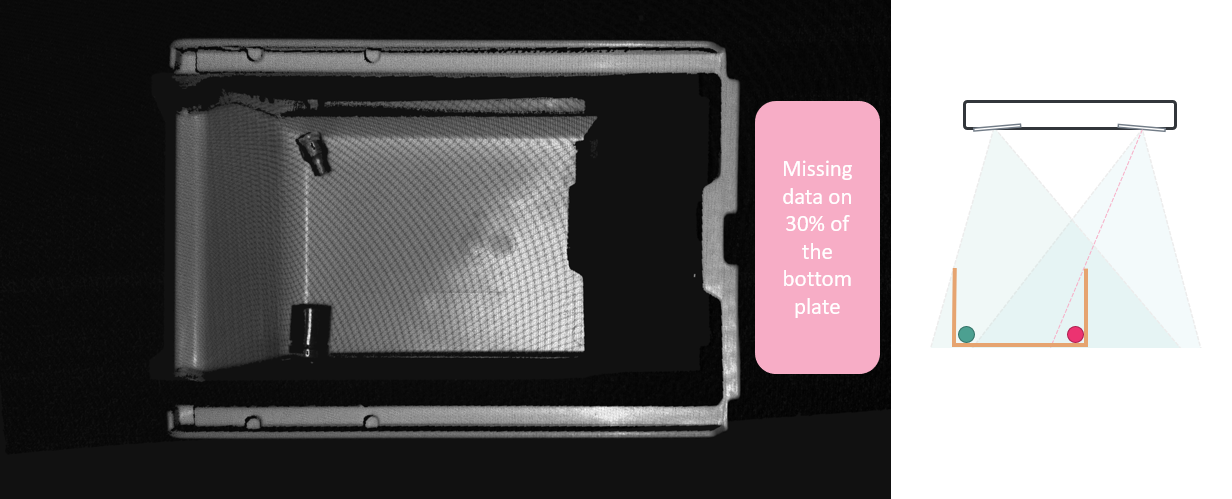
Zivid 3D with a smaller baseline - Fewer occlusion outliers