로봇 소포 분류 및 인덕션
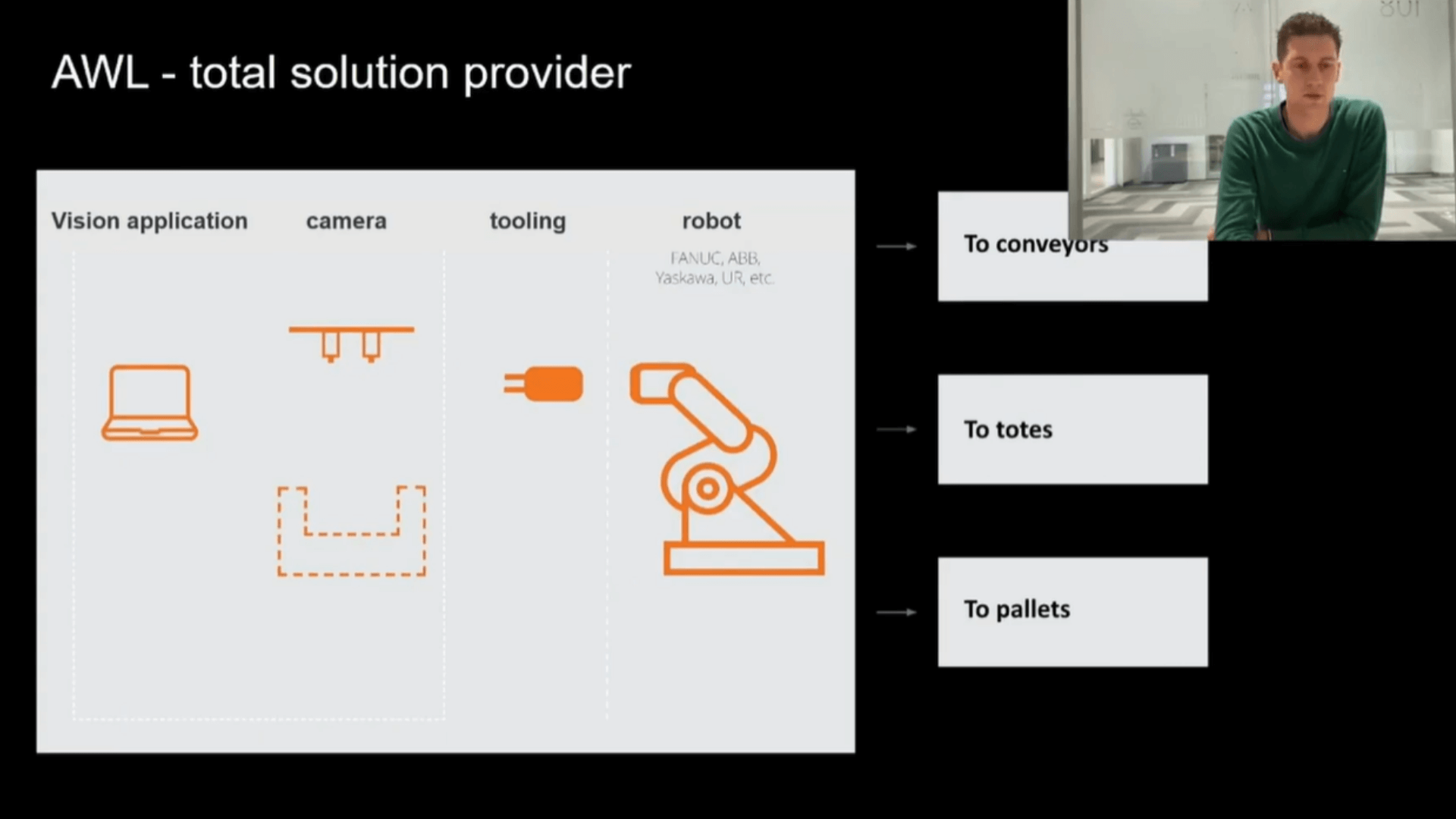
인덕션, 분류, 싱귤레이션을 위한 창고 자동화

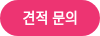
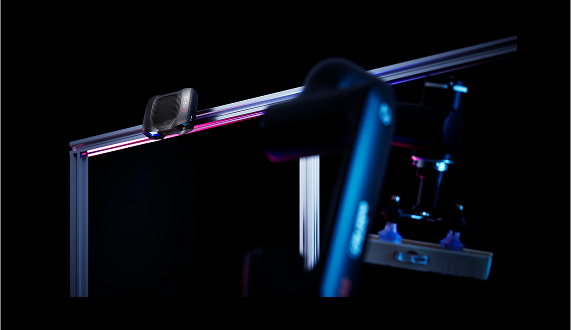
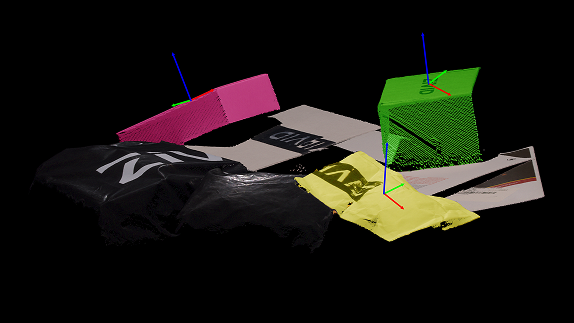
소포 세분화 및 인식
로봇은 2D 및 3D 카메라로 인식하여 소포 더미를 검색하고 각 소포를 서로 구분하려고 시도합니다.
로봇의 픽 포인트 찾기 및 평가
로봇은 감지된 소포 중 어떤 소포를 집어들기에 가장 적합한지, 어디에서 잡을지 예측하려고 시도합니다. 이를 포즈 추정이라고 합니다.
빠르고 안정적으로 반복
로봇이 소포를 배치하고 다시 더미로 돌아가는 동안 비전 시스템은 다음 소포를 선택하므로 로봇은 기다릴 필요 없이 소포를 픽업할 수 있습니다.

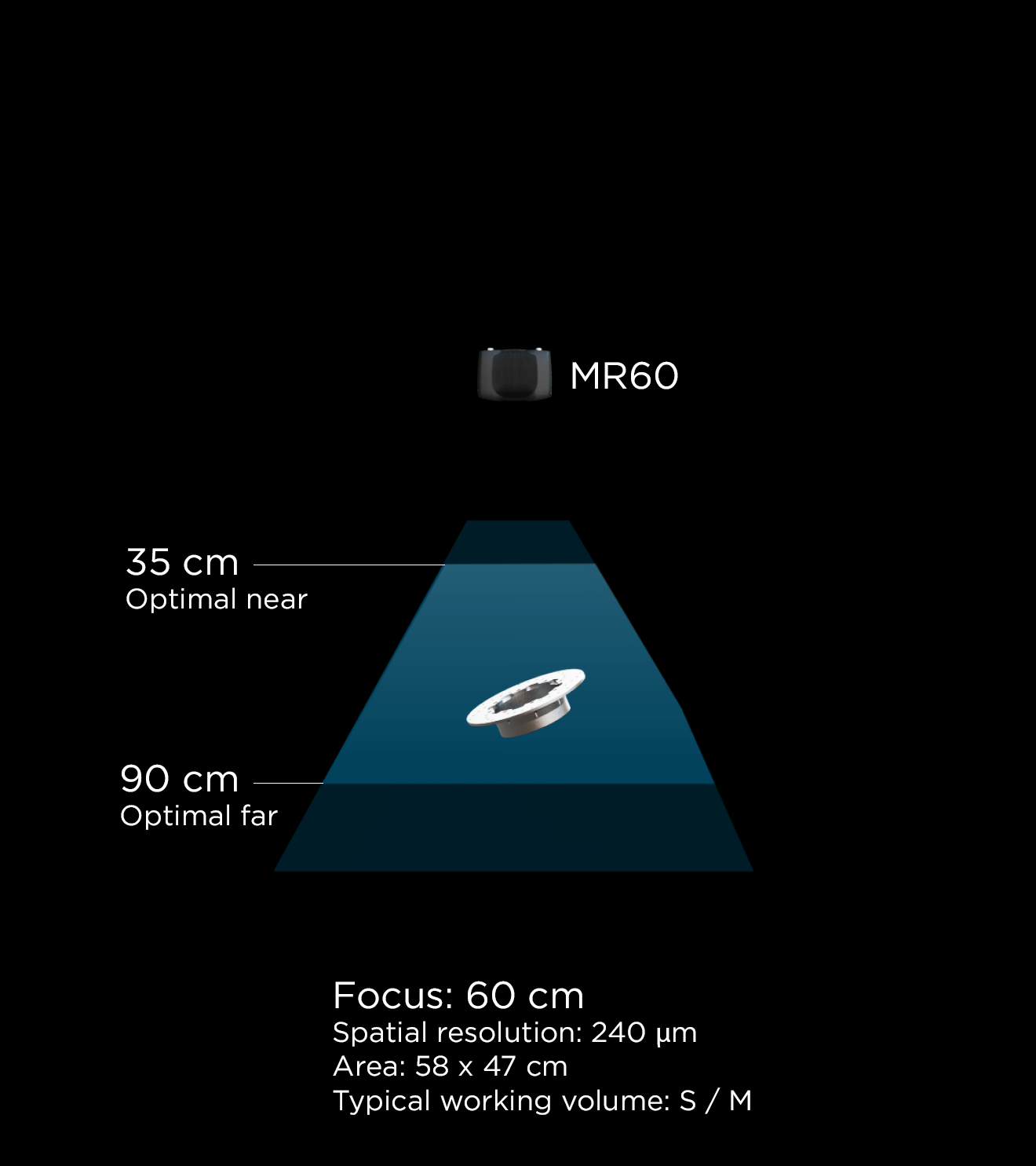
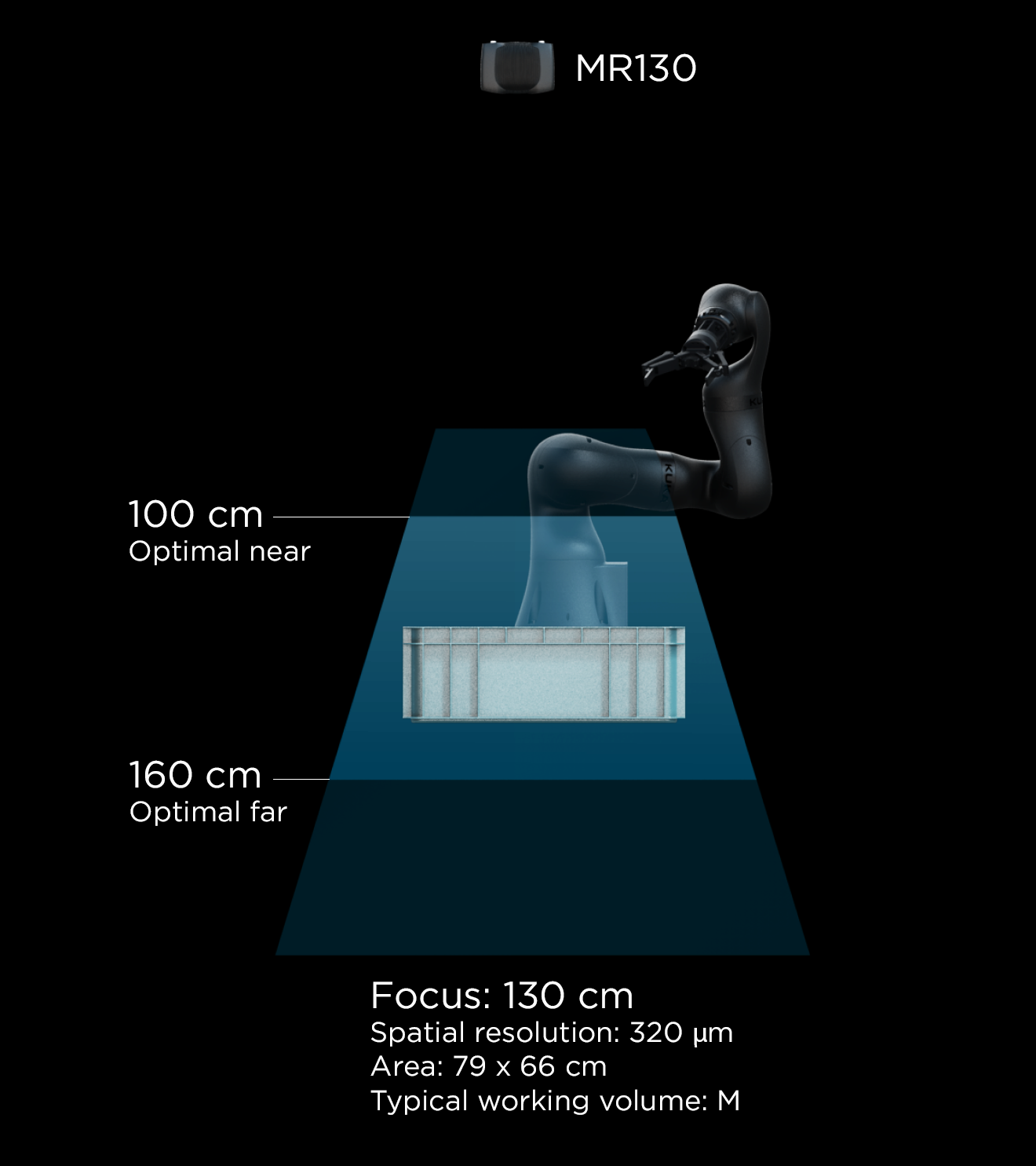
소포 인덕션에 가장 적합한 카메라는 무엇일까요?
저희의 기술 제품 매니저인 Christian이 Zivid 2+ MR130을 주요 제조업체의 다른 두 카메라와 비교하여 어떤 카메라가 소포 인덕션에 가장 적합한지 알아보세요!

.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
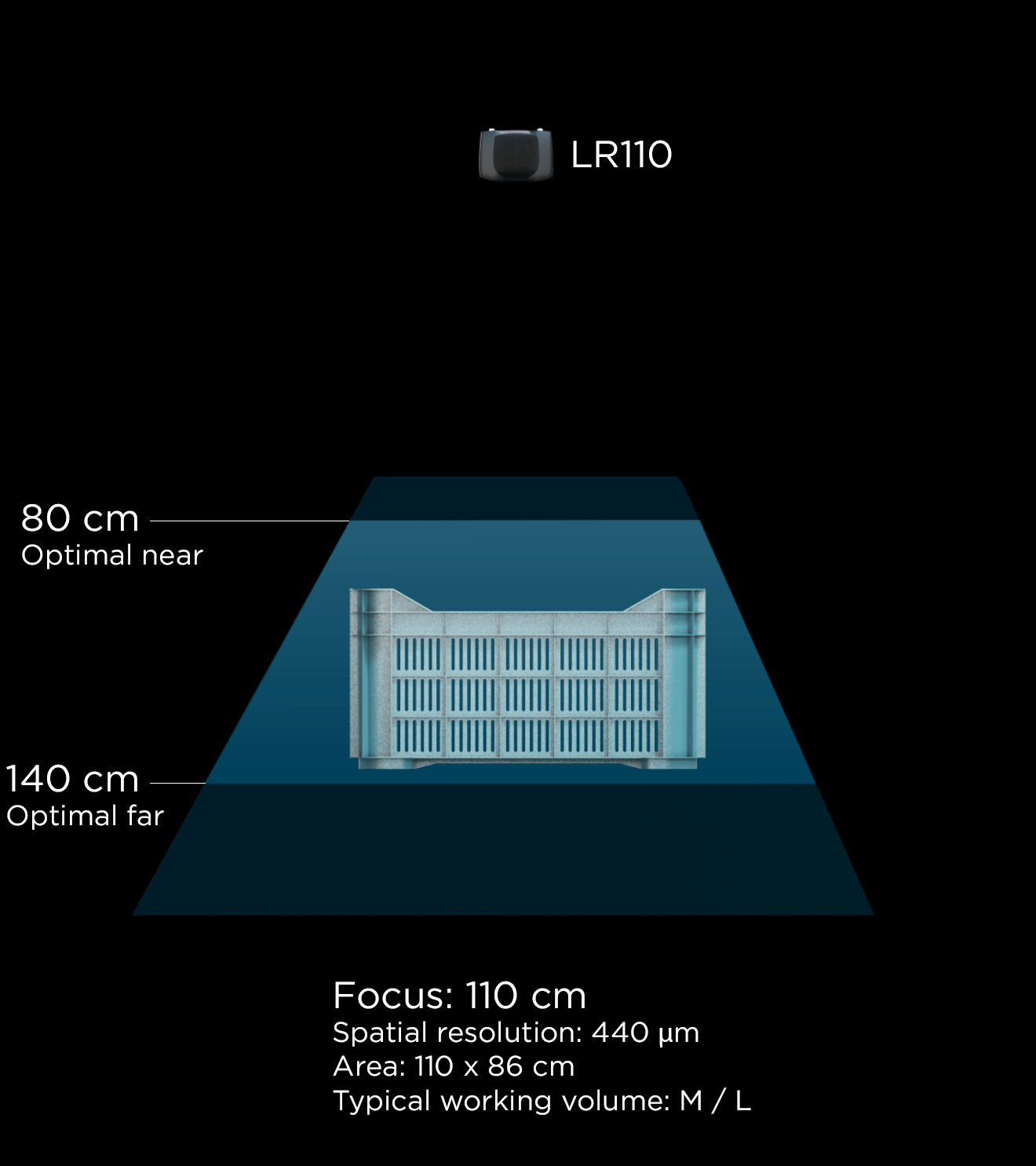
고속으로 소포 유도
무진의 컴퓨터 비전 서브팀 리더인 플로리스 가이서는 "무진은 Zivid의 최신 모델인 Zivid 2+ LR110으로 전환하여 700픽/초에서 최대 1200픽/초까지 처리할 수 있게 되었습니다."라고 말합니다.
비디오 보기 →