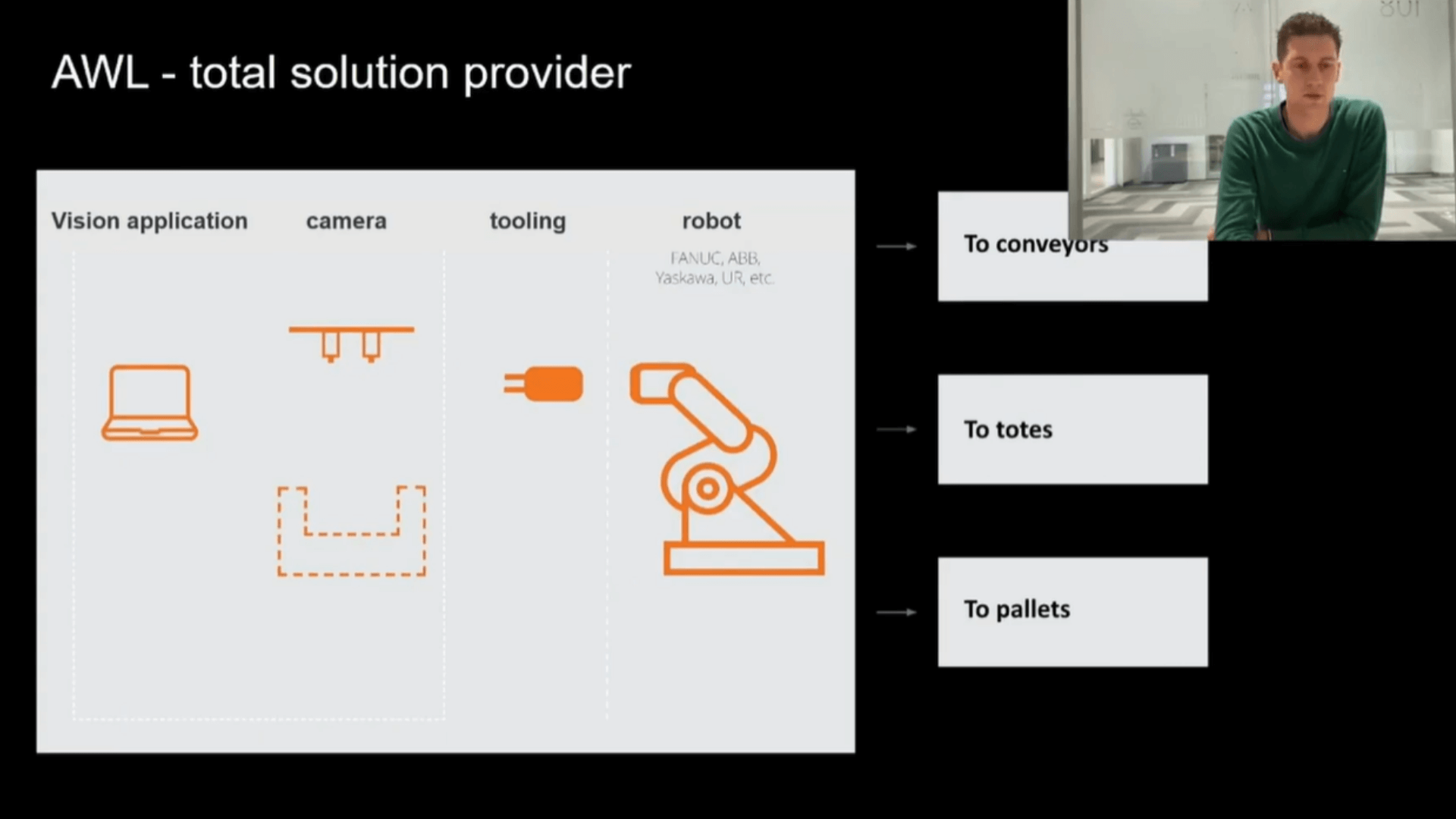
机器人包裹分拣上料
用于上料、分拣和单件分离的仓库自动化解决方案

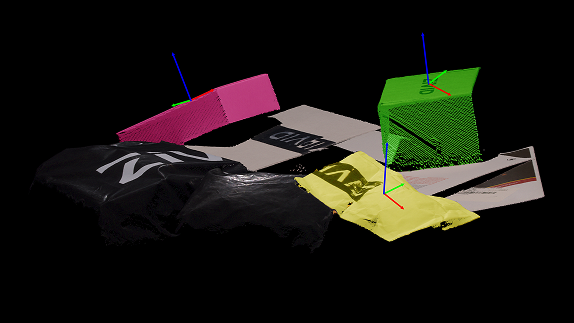
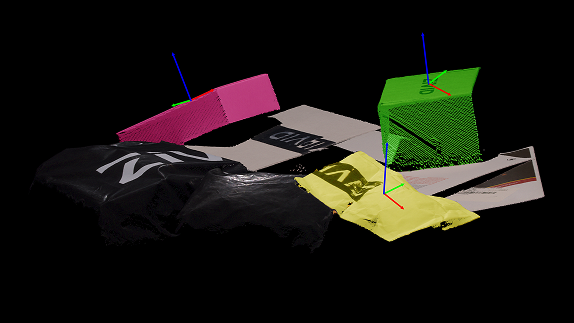
包裹分割与识别
通过结合 2D 和 3D 相机进行感知,机器人在一堆包裹中搜索,并尝试将每个包裹相互分割开来。
定位并评估机器人的抓取点
机器人会评估哪些被检测到的包裹最适合被抓取,以及应从哪里进行抓取。这一过程称为姿态估计(Pose Estimation)。
快速且稳定地重复操作
当机器人放下包裹并返回到包裹堆时,视觉系统会同时选择下一个包裹,以便机器人无需等待即可继续抓取。

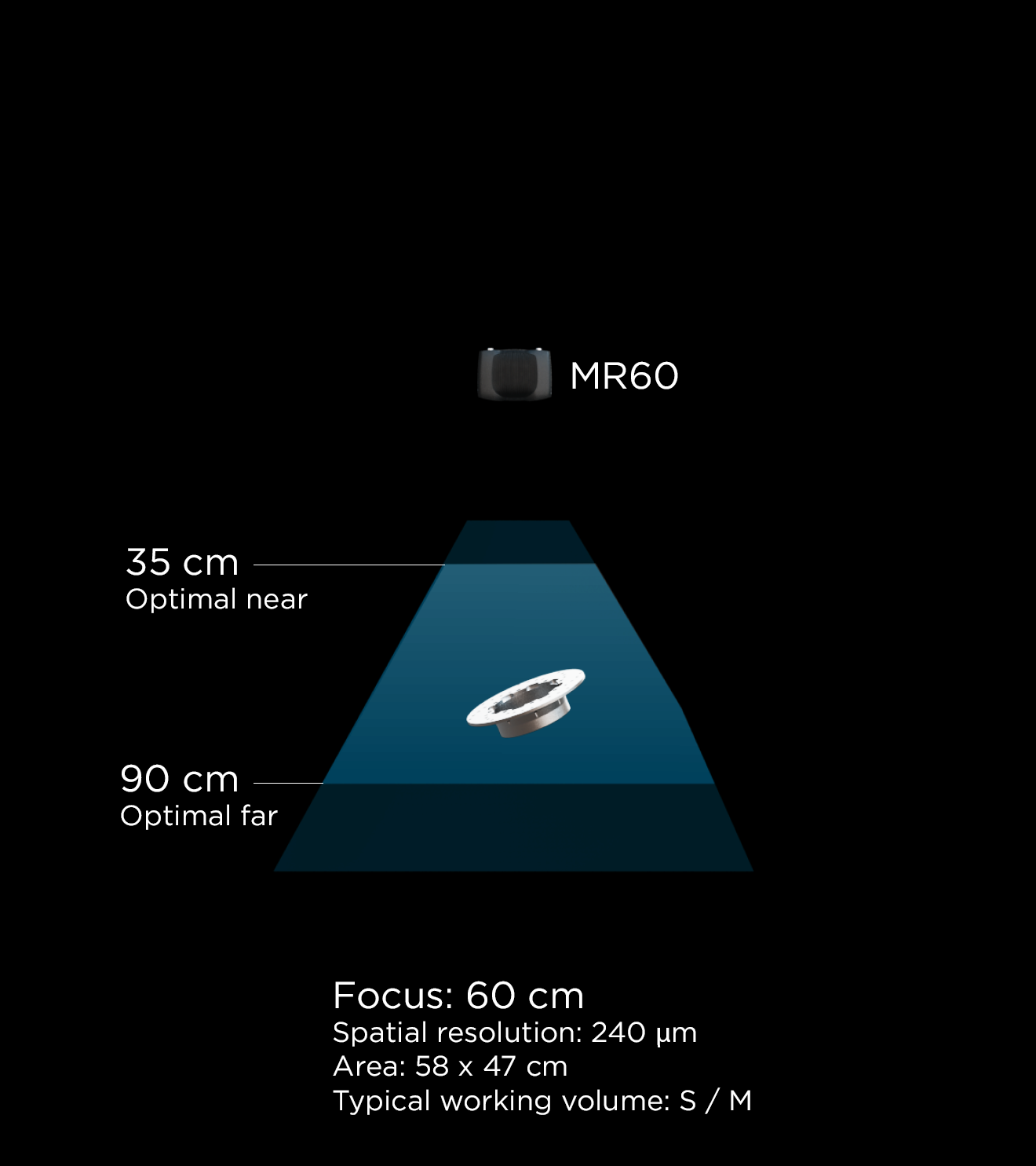
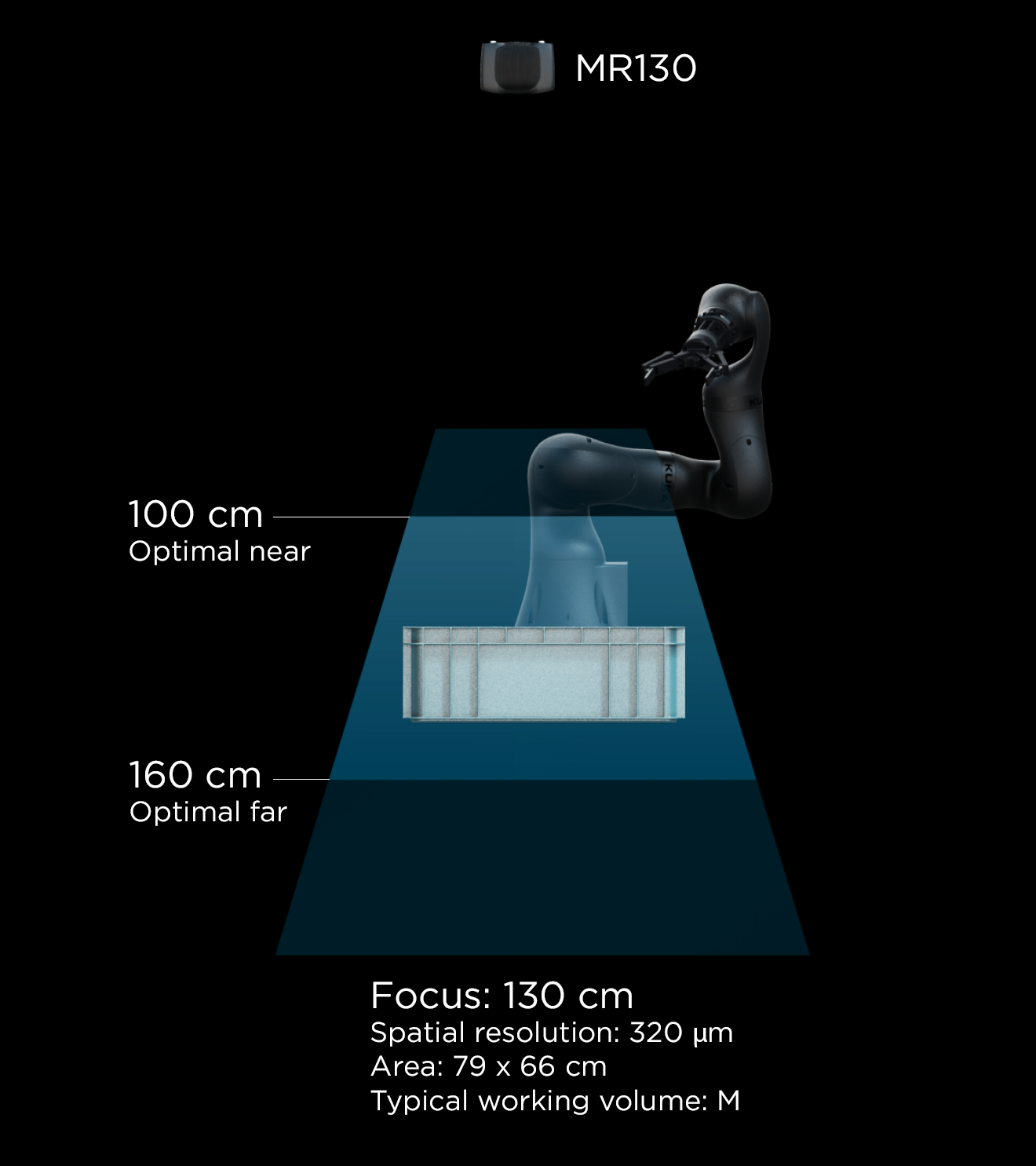
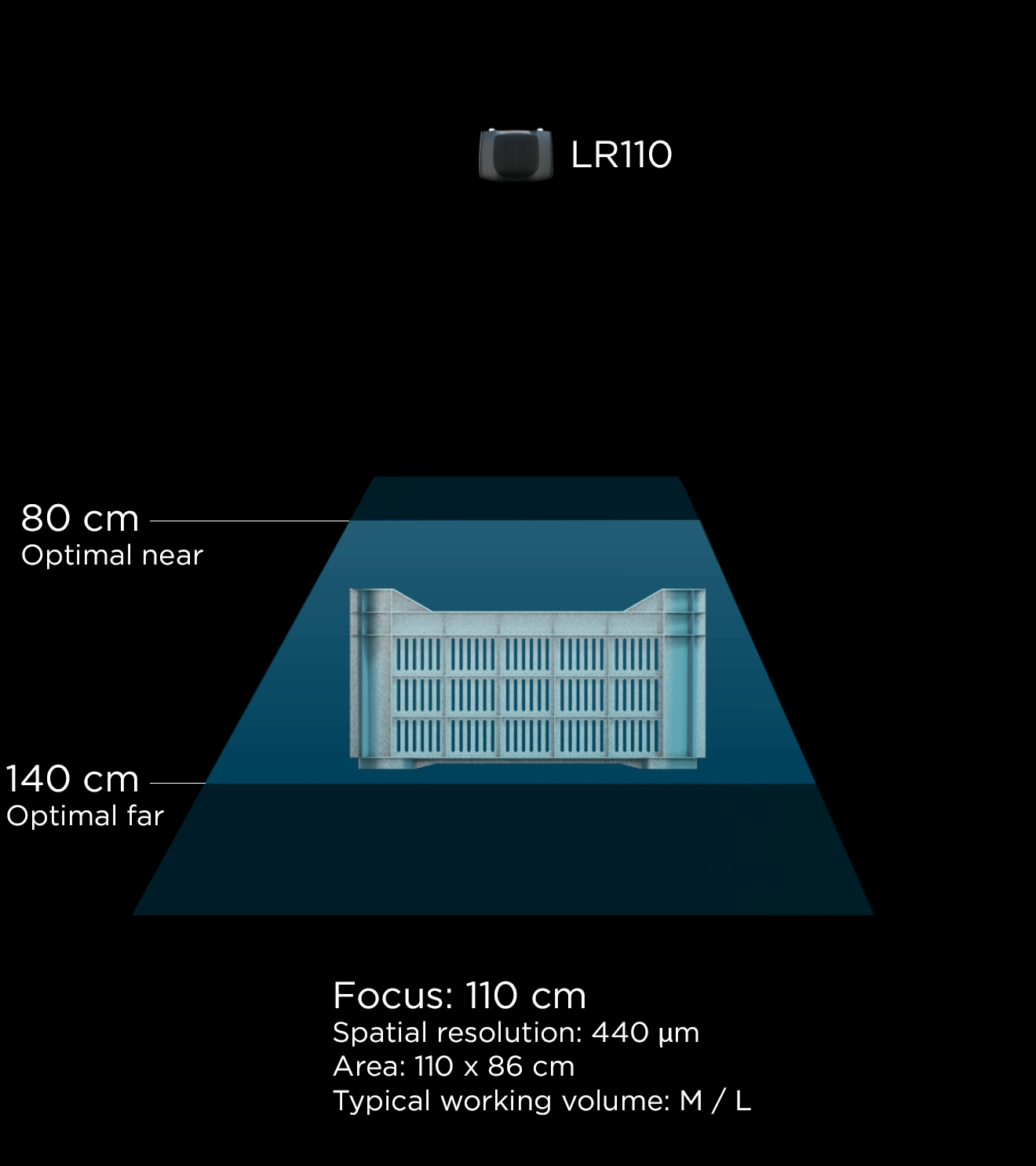
哪一款相机最适合用于包裹上料?
我们的技术产品经理 Christian 对 Zivid 2+ MR130 与两家领先厂商的相机进行了对比——了解哪款最适合您的包裹上料应用!

Handling unknown objects in logistics
.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
Handling unknown objects in logistics
Fizyr detection and picking software, together with Zivid 3D cameras are solving biggest logistics challenges.
Changing the Game of Parcel Sorting with 3D Vision
Changing the Game of Parcel Sorting with 3D Vision
By collaborating with partners, we achieved the world's first successful sorting inductor in the logistics market.
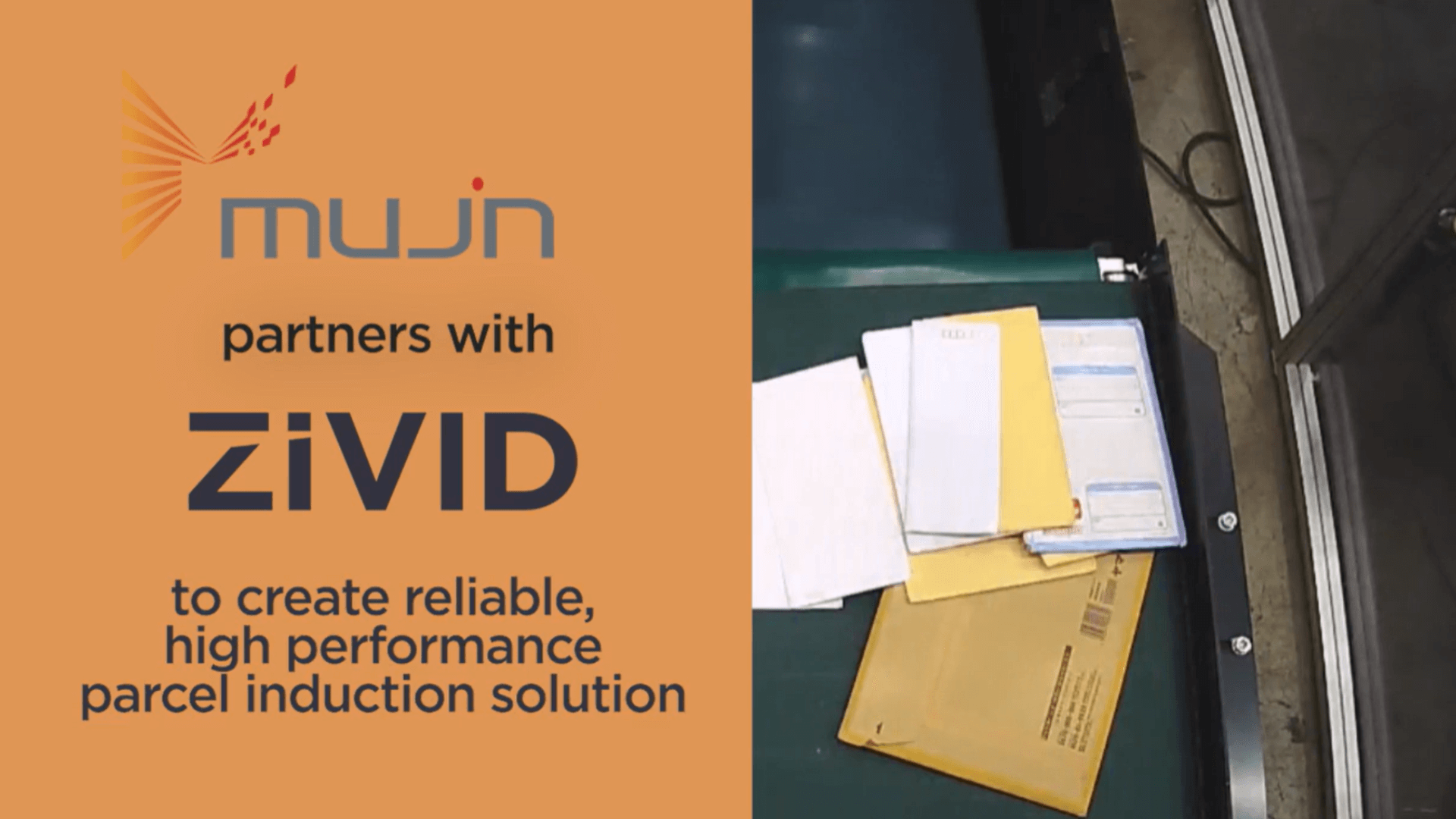
Parcel induction at high-speed
"Mujin managed to go from 700 to up to 1200 picks/h by switching to Zivid's newest model, the Zivid 2+ LR110" says Floris Gaisser, Computer Vision Sub-team lead at Mujin.
Watch the video →