ロボット小包誘導
インダクション、ソーティング、シンギュレーションのための倉庫自動化

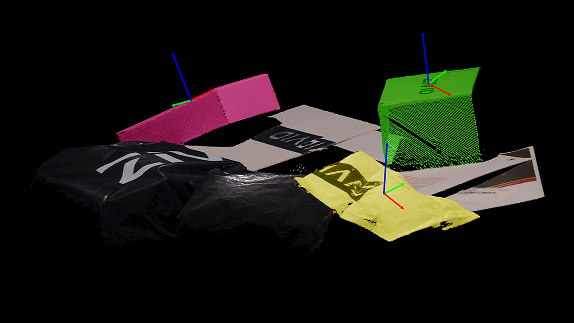
小包のセグメンテーションと認識
2Dカメラと3Dカメラによる知覚を使って、ロボットは小包の山を探し、それぞれの小包を互いに区分けしようとする。
ロボットのピックポイントの位置と評価
ロボットは、検出された小包のうち、どの小包をどの位置でつかむのが最適かを推定しようとする。これを姿勢推定と呼ぶ。
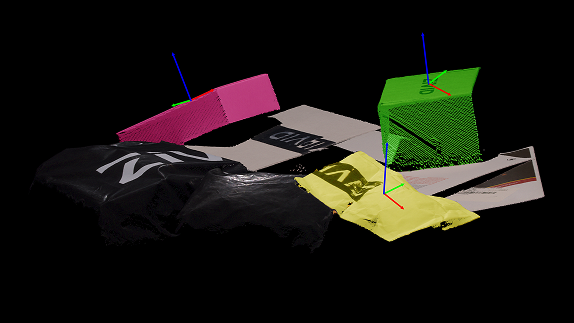
素早く確実に繰り返す
ロボットが小包を置き、山に戻る間に、ビジョンシステムが次の小包を選択するので、ロボットは待つことなく小包を取りに進むことができる。

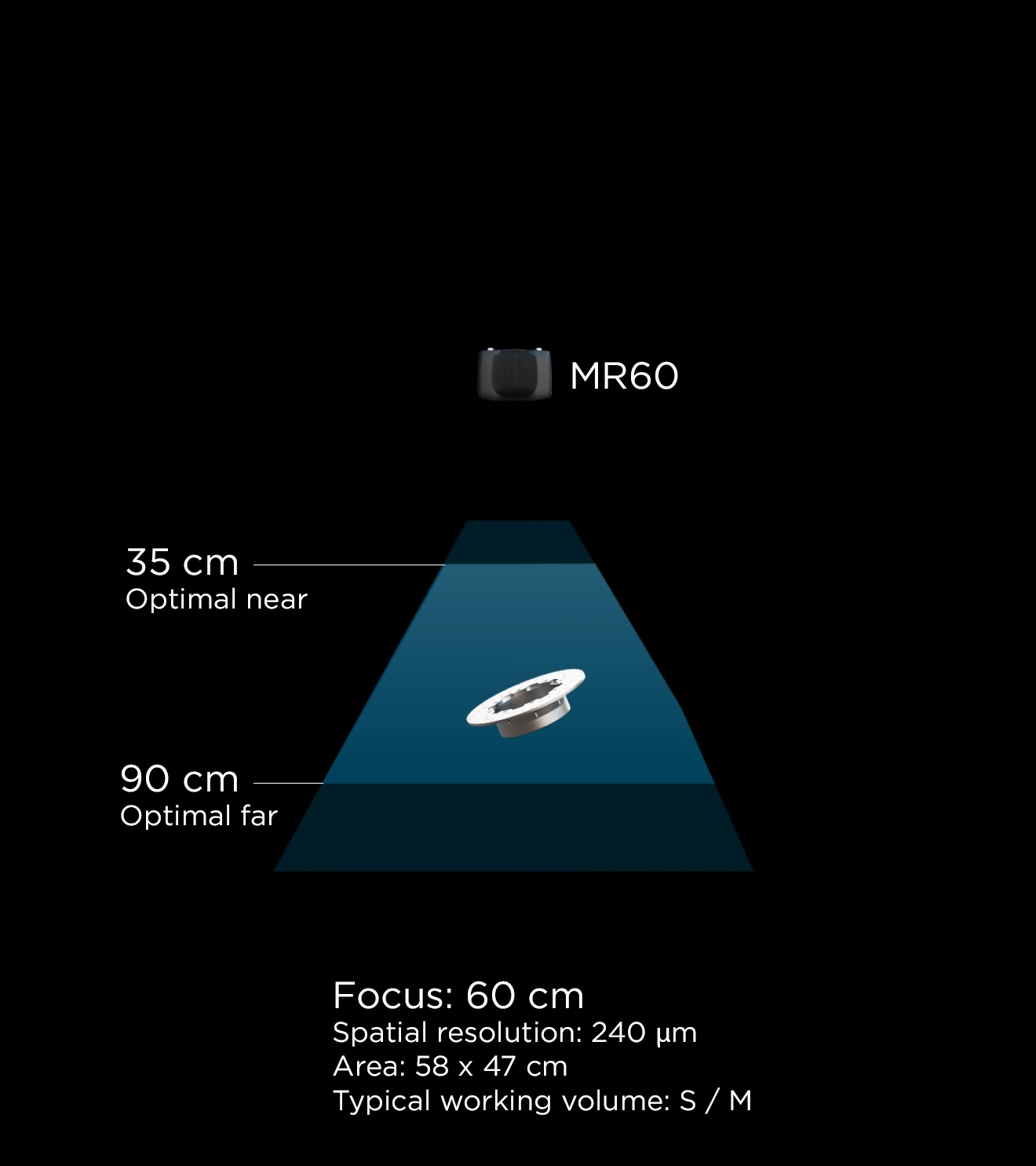
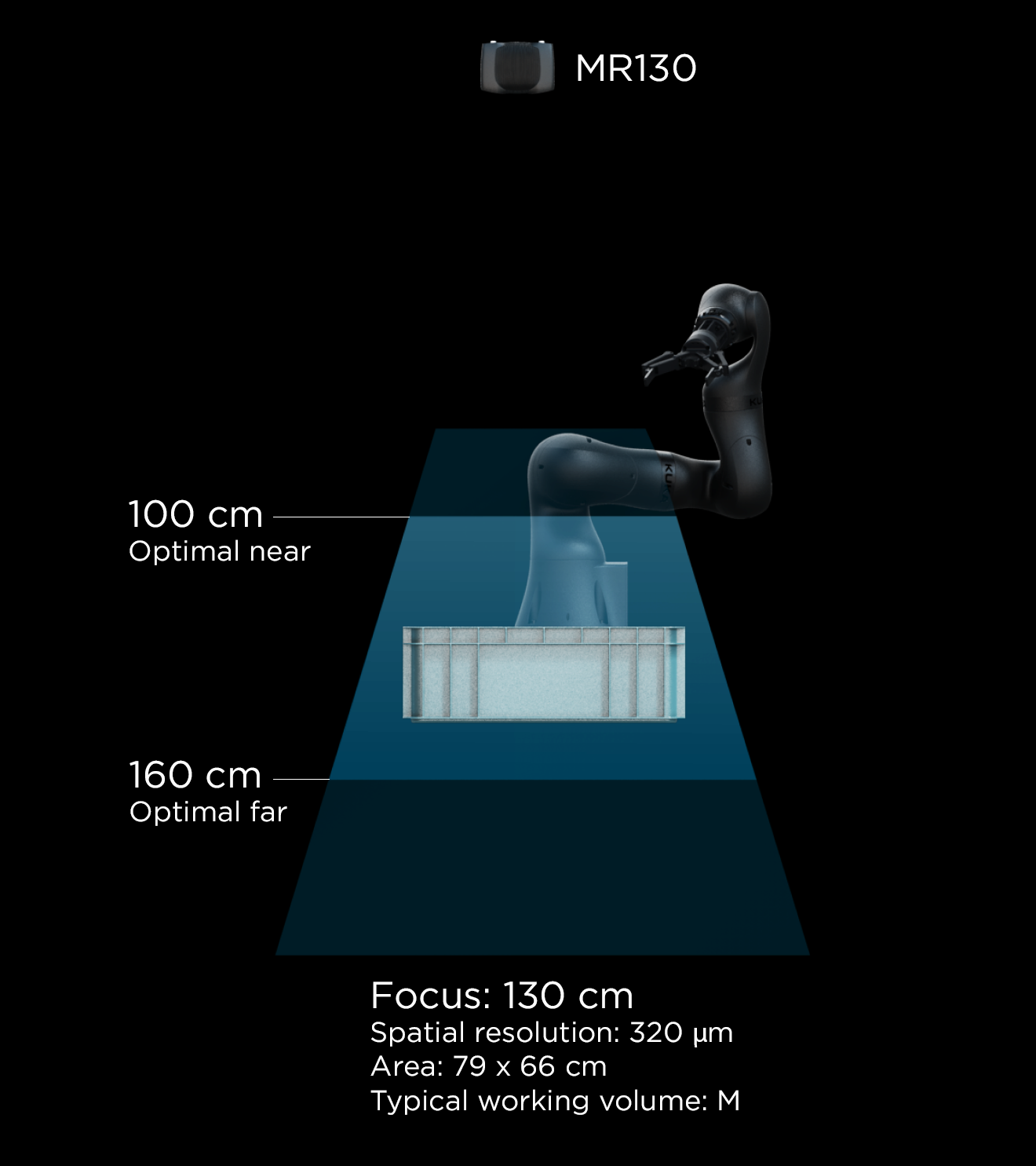
小包誘導に最適なカメラは?
当社のテクニカル・プロダクト・マネージャー、クリスチャンがZivid 2+ MR130と他の主要メーカーのカメラ2台を比較します!

.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
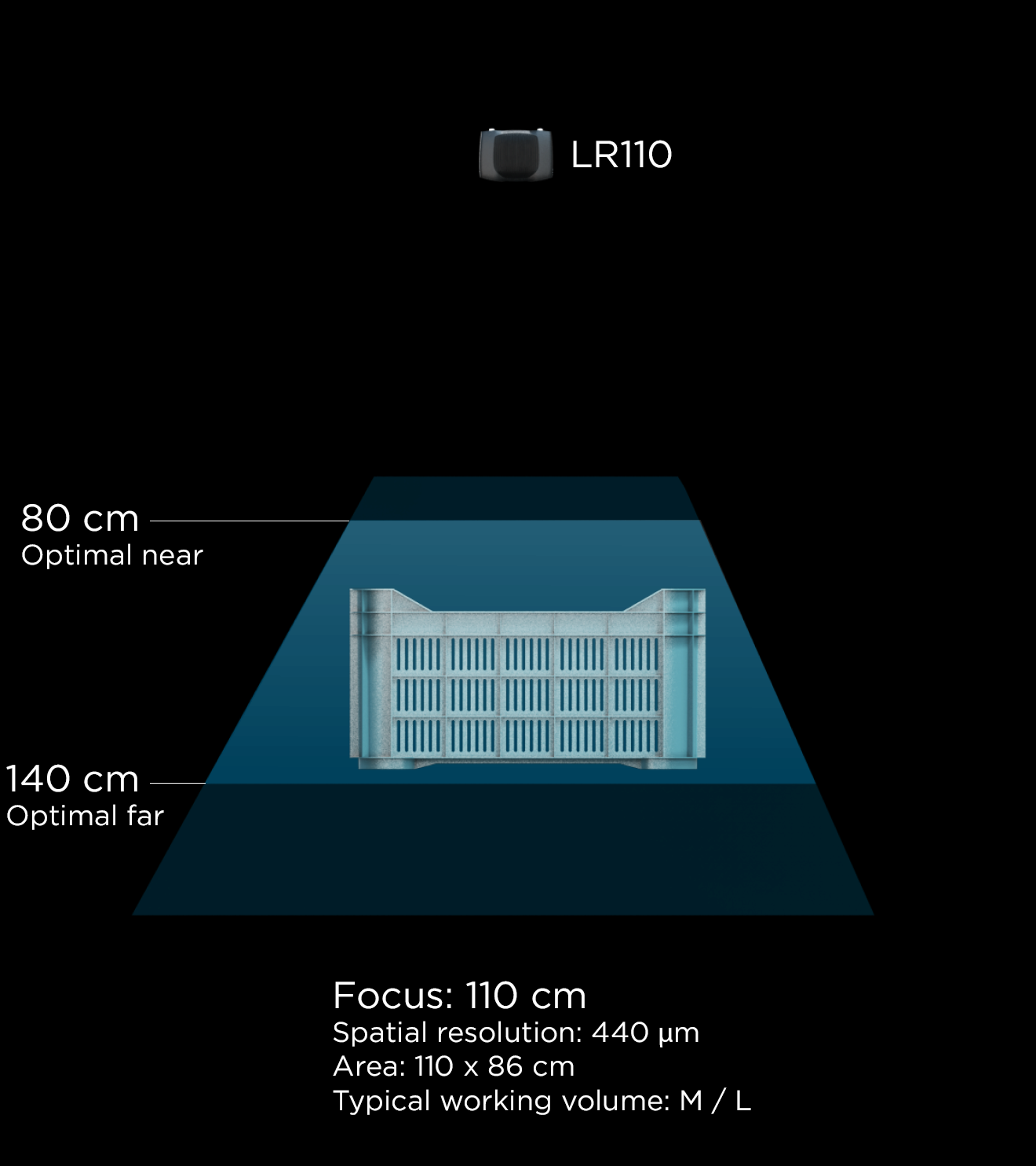
高速での小包誘導
「Mujinは、Zividの最新モデルであるZivid 2+ LR110に切り替えることで、700pick/hから最大1200pick/hまで向上させることができました。
ビデオを見る