
물류 자동화
소포 유도, 포장 및 디팔렛타이징 분야의 3D 머신 비전

신뢰할 수 있는 피킹 정확도
고해상도의 초정밀 기본 3D 포인트 클라우드를 사용하면 로봇이 복잡하거나 겹치는 장면에서도 개별 소포를 정확하게 인식하고 분할할 수 있습니다.
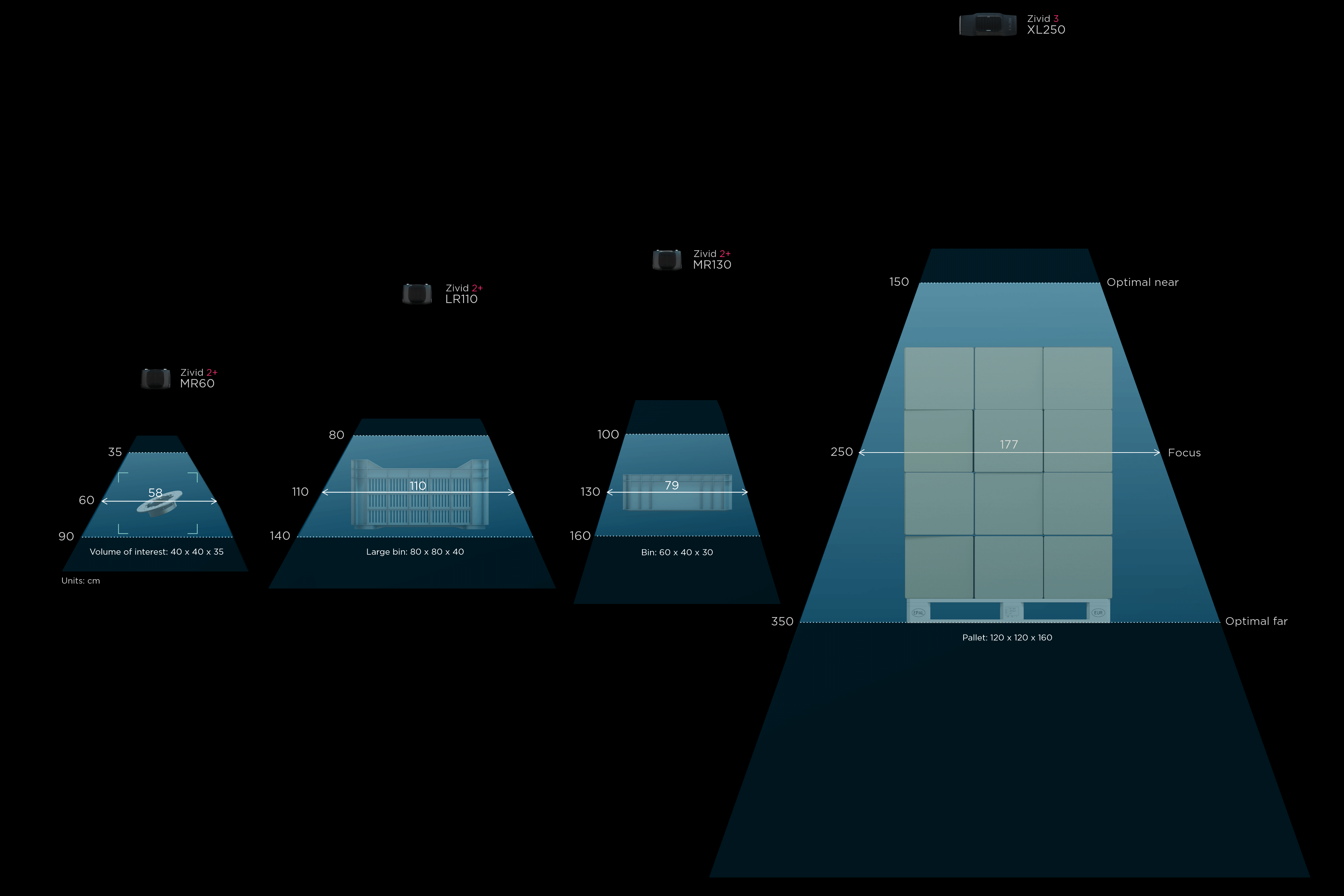
유연한 시야각

넓은 시야(FOV)와 긴 작업 거리를 갖춰 대형 작업 영역을 캡처하도록 설계되었으며, 0.5초 미만의 시간 안에 완전한 2D + 3D 스냅샷을 획득할 수 있습니다.
빠르고 반복 가능한 성능
로봇이 소포를 배치하고 더미로 돌아가는 동안 비전 시스템이 다음 물품을 식별하여 유휴 시간 없이 원활하고 중단 없이 피킹을 수행할 수 있습니다.
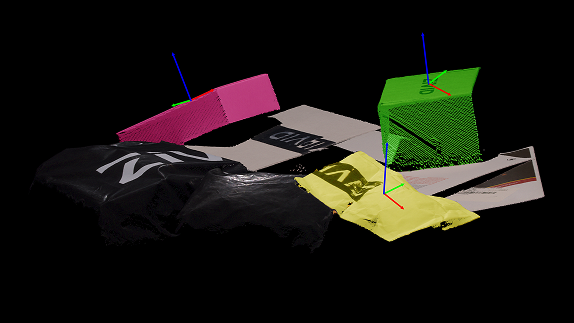

Fizyr | 물류에서 알 수 없는 물체 처리하기
.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
Fizyr | 물류에서 알 수 없는 물체 처리하기
피지르 감지 및 피킹 소프트웨어는 지비드 3D 카메라와 함께 가장 큰 물류 문제를 해결하고 있습니다.
Solwr | 창고 자동화를 위한 모바일 피킹 로봇
.png?width=1144&height=640&name=solwr%20(1).png)
Solwr | 창고 자동화를 위한 모바일 피킹 로봇
지디드의 3D 비전으로 구동되는 Grab™ 로봇은 빠르고 정확한 물품 피킹과 유연성으로 창고 자동화를 혁신합니다.