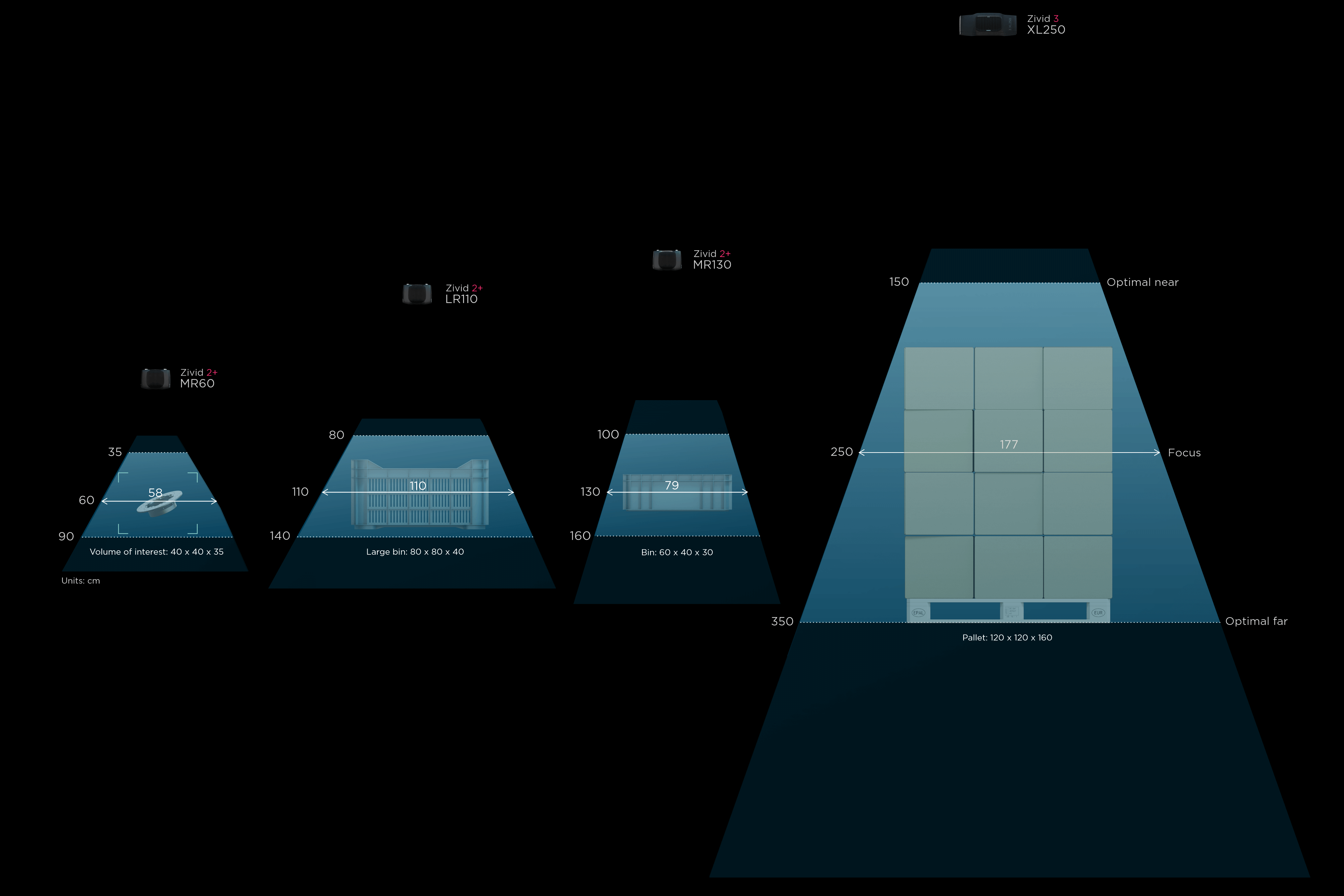
複雑な部品形状

ロボットは、平らなシートから曲面、波形、大きな面、不規則な面まで、多品種の部品を仕上げなければならない。
反射する金属表面

光沢のある部品は、3Dデータに欠落や歪みを生じさせ、信頼性の高い自動化を制限します。
ミリメートル・レベルの精度

埃や振動、変化する環境光の中で、厳しい公差を維持するのは難しい。










Graymatter Robotics|AIを搭載したロボットによる表面仕上げ

ロボット搭載
Graymatter Robotics|AIを搭載したロボットによる表面仕上げ
GrayMatter社は、ZividカメラをAIを搭載したロボットセルに統合し、表面仕上げ用途で正確な色精度の3Dスキャンを可能にした。
Cohesive Robotics|仕上げ工程の合理化

ロボット搭載
Cohesive Robotics|仕上げ工程の合理化
Smart Finishing Robotic Workcell™は、部品の位置を特定し、精密な表面仕上げ作業を行うことができます。
Pickit|マルチロボット3Dビジョンで高精度な車体シーリングを実現

定置式
Pickit|マルチロボット3Dビジョンで高精度な車体シーリングを実現
Pickitの高精度車体シーリングソリューションは、マルチロボット3Dビジョンを活用し、効率的で信頼性の高い自動車生産を実現します。