物流
包裹感应、包装和拆垛中的 3D 机器视觉

可靠的分拣精度
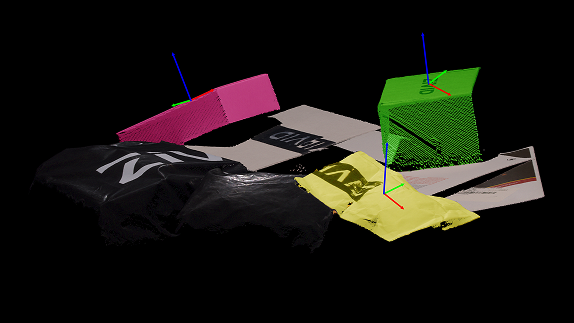
高分辨率、超精确的原生 3D 点云可让机器人准确识别和分割单个地块,即使在杂乱或重叠的场景中也是如此。
灵活的视野
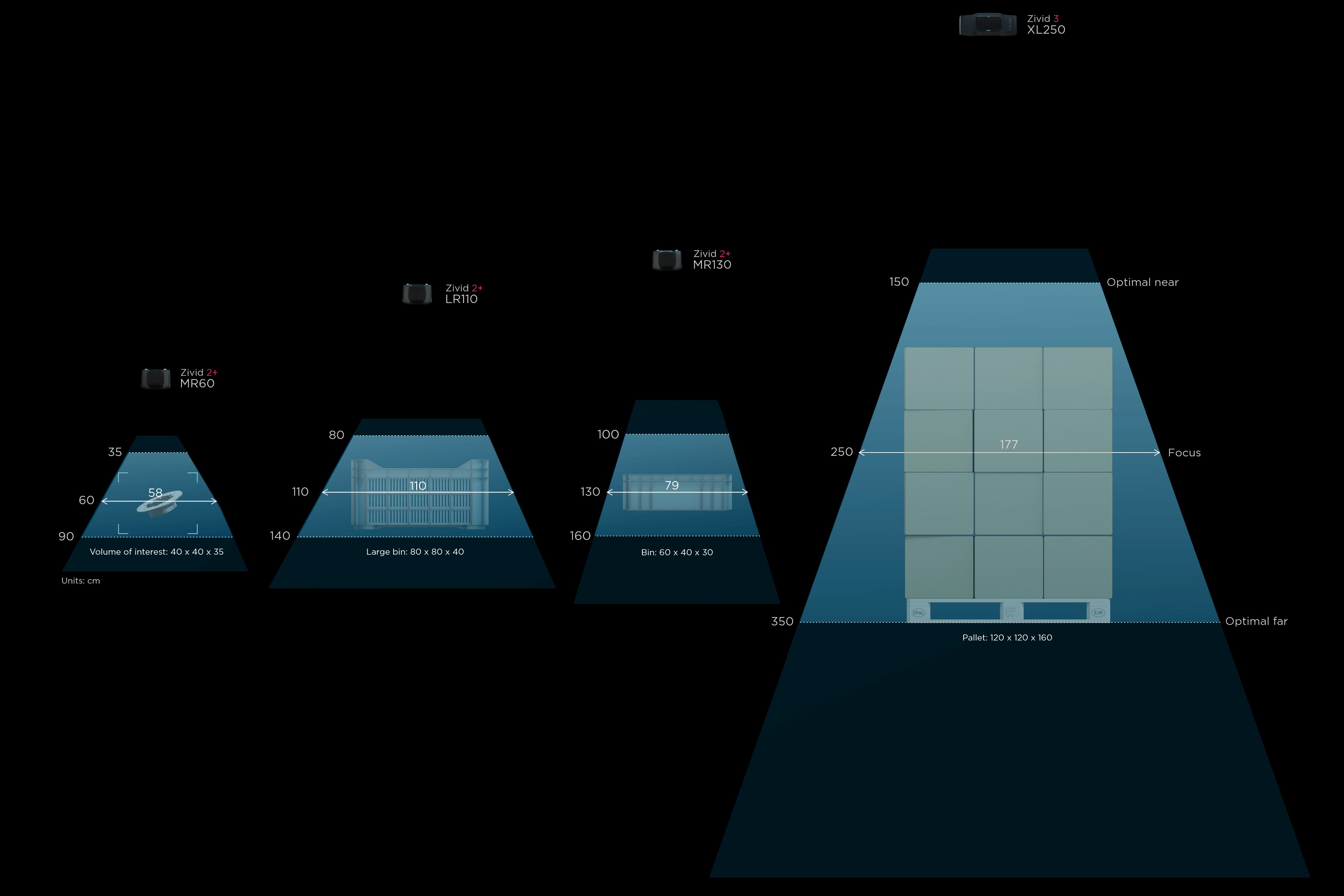
专为捕捉大工作体积而设计,具有宽视野(FOV)和长工作距离,可在不到 0.5 秒内获取完整的 2D + 3D 快照。
快速、可重复的性能
当机器人放置一个包裹并返回堆放处时,视觉系统会识别下一个物品,从而实现无缝、不间断的分拣,没有空闲时间。

.png?width=1920&height=1080&name=item%20picking%20by%20Fizyr%20(1).png)
.png?width=1144&height=640&name=solwr%20(1).png)





包裹感应、包装和拆垛中的 3D 机器视觉
高分辨率、超精确的原生 3D 点云可让机器人准确识别和分割单个地块,即使在杂乱或重叠的场景中也是如此。

专为捕捉大工作体积而设计,具有宽视野(FOV)和长工作距离,可在不到 0.5 秒内获取完整的 2D + 3D 快照。
当机器人放置一个包裹并返回堆放处时,视觉系统会识别下一个物品,从而实现无缝、不间断的分拣,没有空闲时间。