


Zivid

Structured-light camera alternative
Zivid
Structured-light camera alternative
Zivid
Structured-light camera alternative
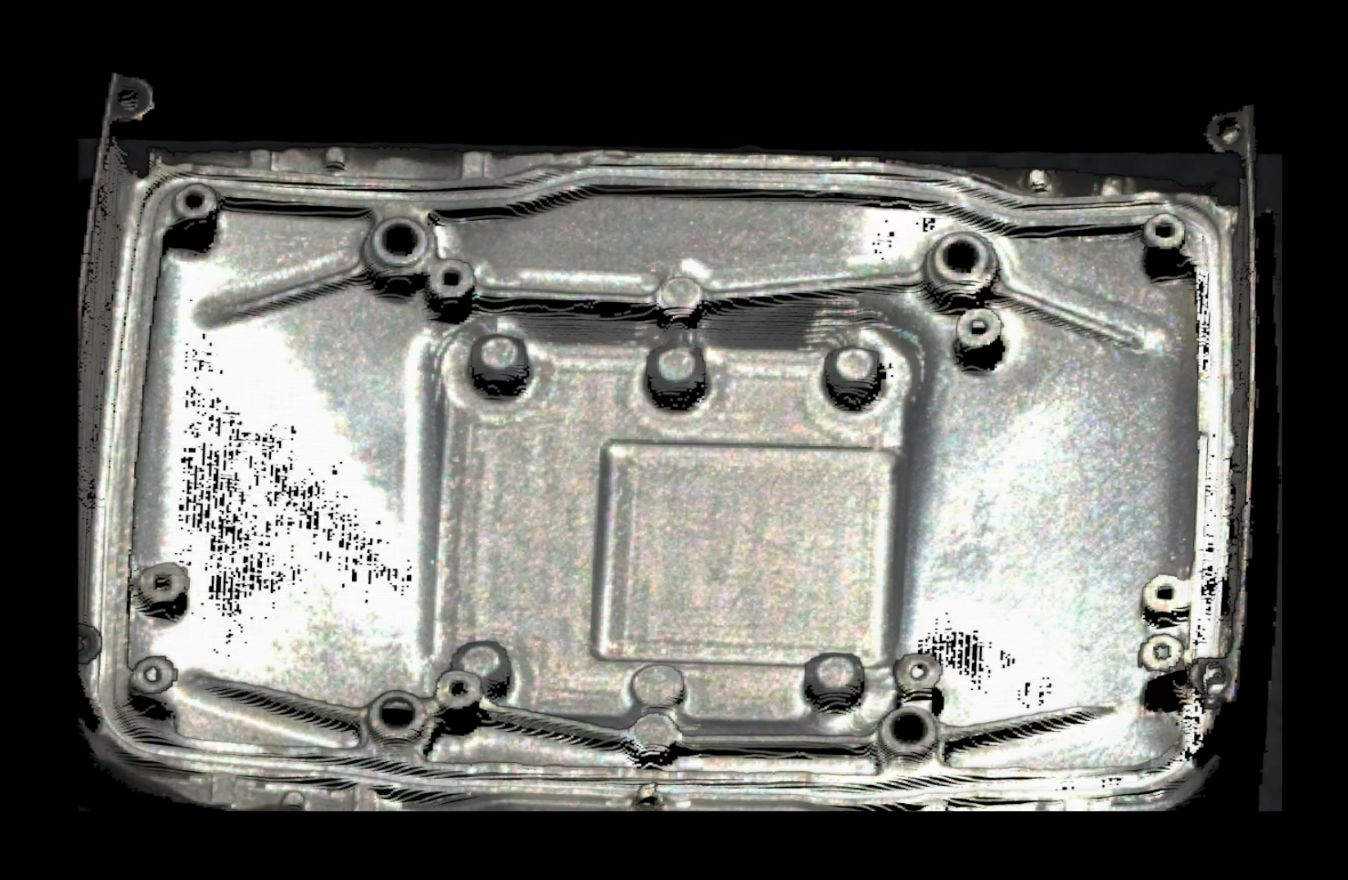
Zivid 3D相机即使在拍摄黑色塑料、有光泽的金属或复杂形状等具有挑战性的材料时,也能生成密集且精确的点云数据。借助其专利的高动态范围(HDR)技术,Zivid相机可捕捉从小型到大型、从简单到复杂的各种物体的精细细节,即使在最严苛的场景中也能确保卓越的覆盖率。
Zivid 2+ 3D点云质量
| Parameter | Details |
| Resolution |
5 megapixels XYZ, RGB, SNR |
| High dynamic range |
max 129 dB for HDR acquisition |
| Point precision |
80 microns |
| Trueness |
> 99.8% |
| Capture time |
910 ms for detailed and small features |

在生产环境中的可靠性能
即便是温度、震动或环境光的轻微变化,也可能因校准漂移而显著影响3D视觉性能。虽然许多3D相机在受控实验室环境中表现良好,但仓库和工厂等真实环境对系统的稳健性和可靠性提出了更高要求。






Zivid 相机在出厂时已进行校准,以确保长期稳定性,并专为应对恶劣工业环境而设计,包括极端温度、冲击和振动。每台设备都经过严格测试,以确保精度一致、防止过热,并在数千万次点云采集过程中保持稳定性能。使用 Zivid,可以减少组件故障,使系统设计更加可靠。
Zivid 2+ 工业级制造质量
| Parameter | Details |
| Accelerated lifetime testing |
+5000 hours of operational testing for each camera |
| Tested for harsh environments |
15G shock, 5G sinusoidal, over-temp, over-wattage, over photon exposure |
| Pre-delivery tests |
100+ hours of arduous performance, reliability, and calibration tests |
| Ultra-compact form-factor |
169 x 124 x 56 mm³ |
灵活的机器人安装集成
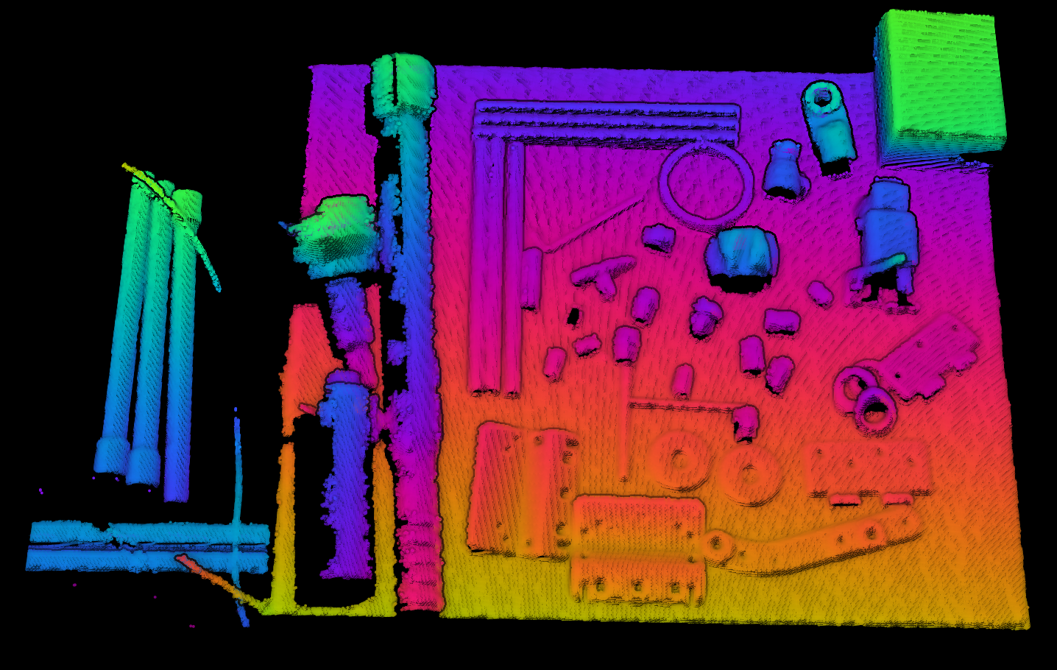
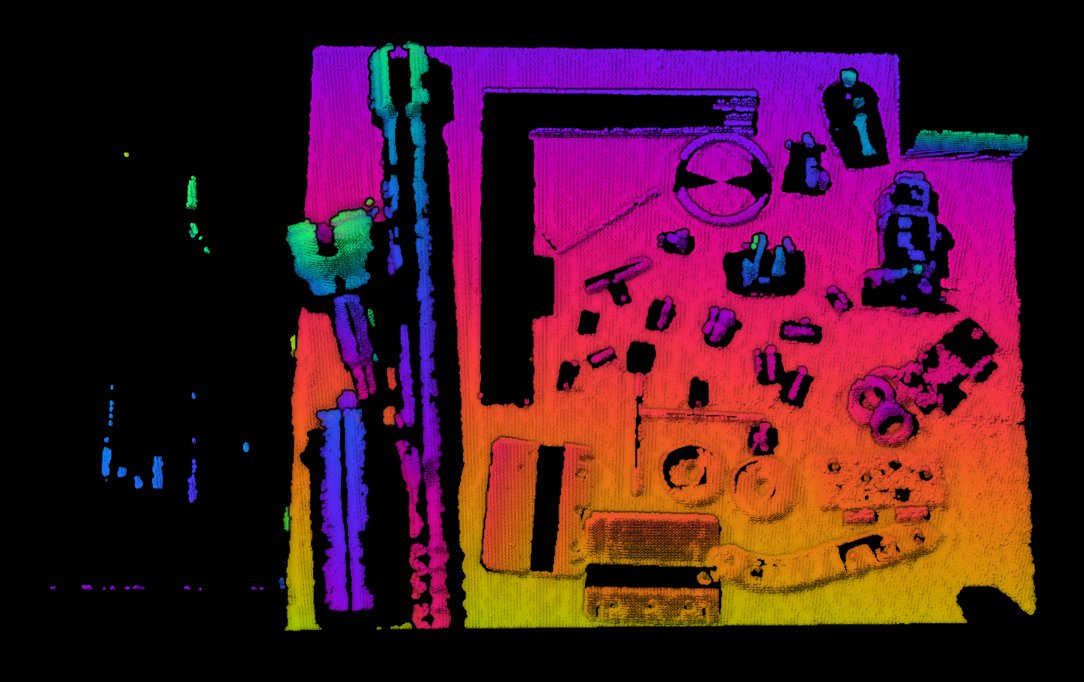
Zivid 3D 相机适用于固定安装和机器人安装。其紧凑的短基线设计可减少盲区、遮挡、光学奇异点和点云伪影。机器人安装为需要高精度、近距离成像和广视野的应用拓展了可能性。这使我们能够在较短的拍摄距离下获得高精度和高分辨率的数据。
相比之下,具有较大基线的 3D 相机可能会限制机器人运动、增加碰撞风险,并增加不必要的负载。这类设计通常校准不稳定,且需要频繁调整,因为它们并非为机器人安装而设计。
大基线——场景细节丢失、出现空洞和数据缺失

Zivid 3D 相机采用较小基线设计——遮挡异常点更少

在 Zivid,我们以专注于 3D 相机技术而自豪——我们致力于开发快速、精准、工业级的彩色 3D 相机,专门解决自动化中的核心挑战。我们积极与视觉系统集成商和自动化解决方案提供商合作,致力于将更智能、更可靠的 3D 视觉技术引入工厂现场。
探索先进 3D 视觉在制造业中的应用
在本次实操演示中,我们的视觉工程师使用 Zivid 2+ MR60 相机,对制造场景中的实际点云进行了测试——涵盖从检测、机器人引导到料箱拣选的多个应用。
