机器人引导
先进的机器人引导系统可用于制造业中复杂的表面精加工、焊接、涂胶和打磨作业。

捕捉每个细节
实现高度详细、精确和完整的点云,即使是小型、反光和复杂的制造部件也不例外。
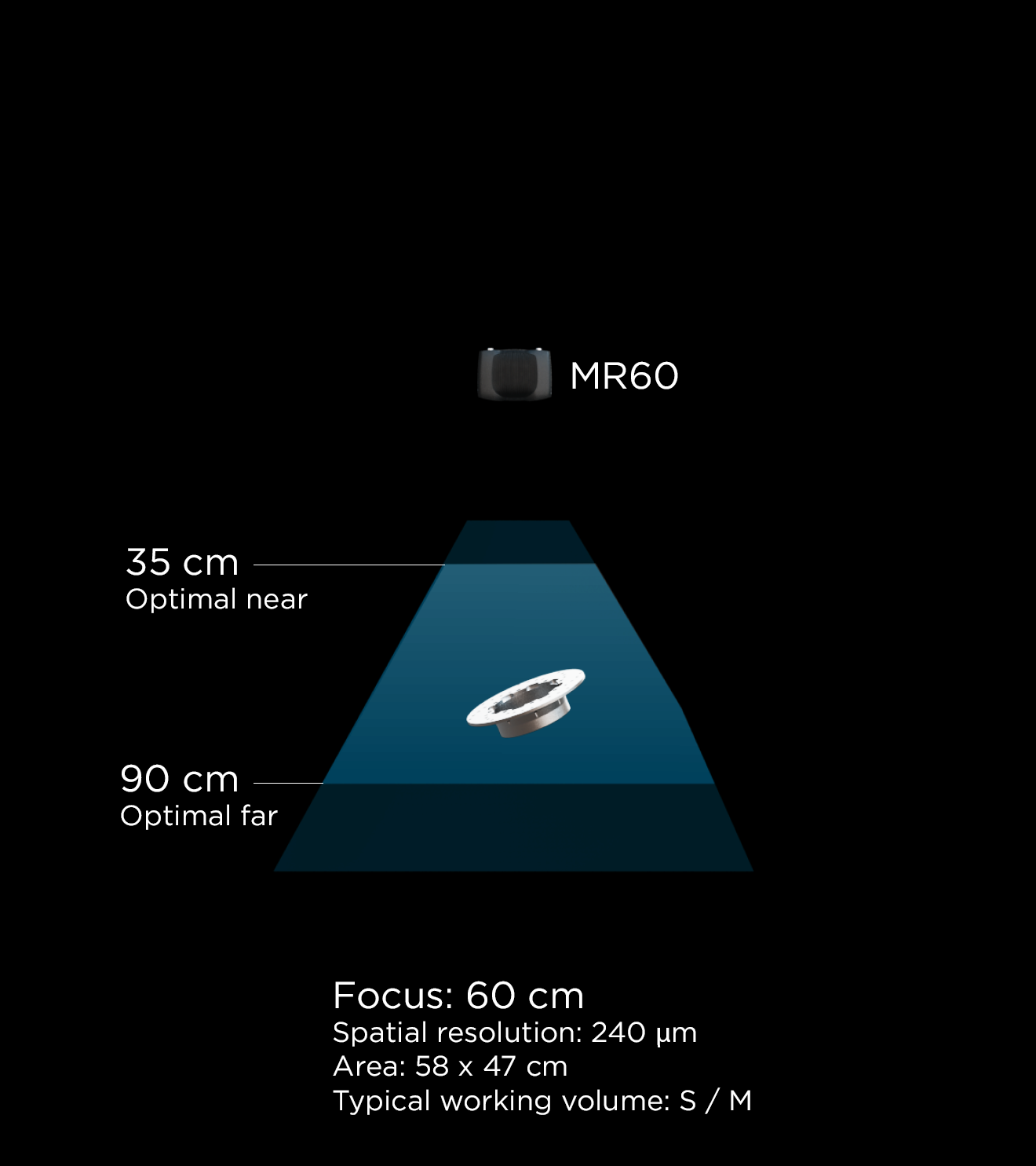
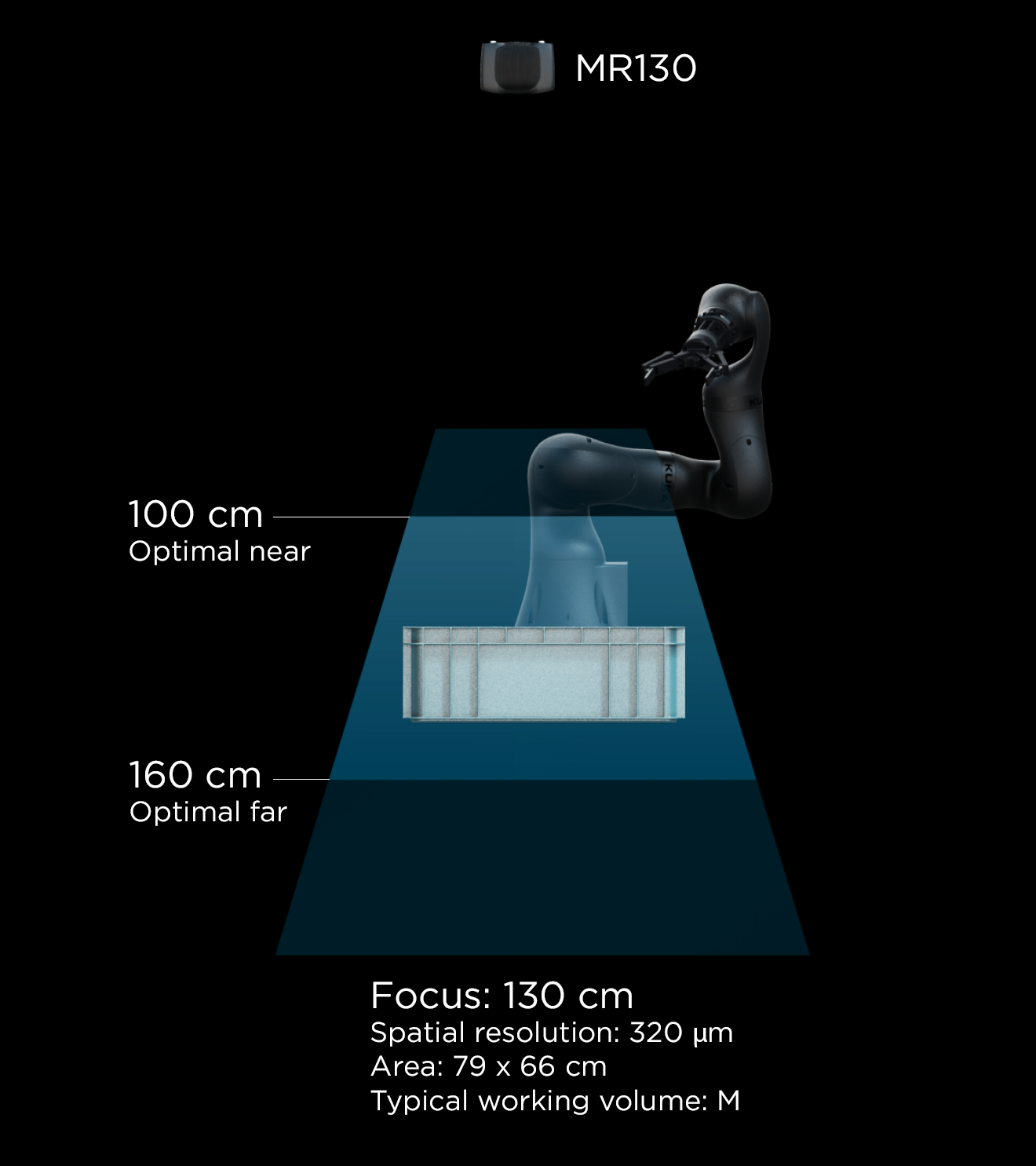
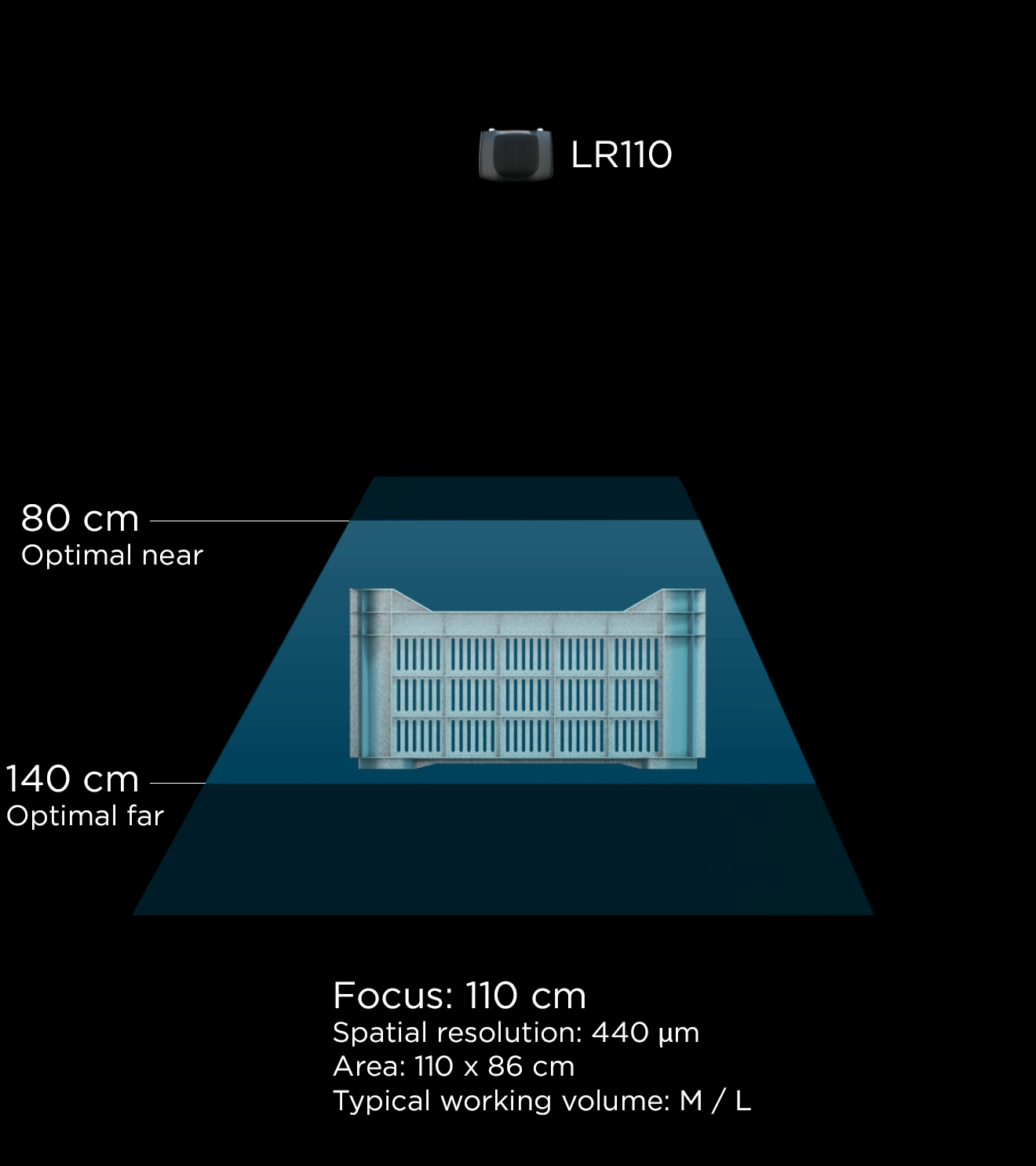
灵活定位

将 3D 摄像头定位在最佳距离和角度可提高捕捉质量,并使机器人能够在多个工作空间内运行。
在工业环境中性能可靠

工业级 3D 视觉相机即使在高温、颗粒密集和充满挑战的环境中也能提供稳定的性能。
为什么Zivid三维相机是制造自动化的完美选择?
我们的应用工程师German揭示了Zivid 2+ R系列三维热像仪如何将高精度和多功能性应用于制造任务中,如料仓拣选、机器操作、装配和机器人表面处理。

Graymatter Robotics | 人工智能机器人表面精加工

Graymatter Robotics | 人工智能机器人表面精加工
GrayMatter 将 Zivid 摄像头集成到其人工智能机器人单元中,为表面精加工应用实现了精确、色彩准确的三维扫描。
.jpg?width=1920&height=1080&name=ramlab_11zon%20(1).jpg)