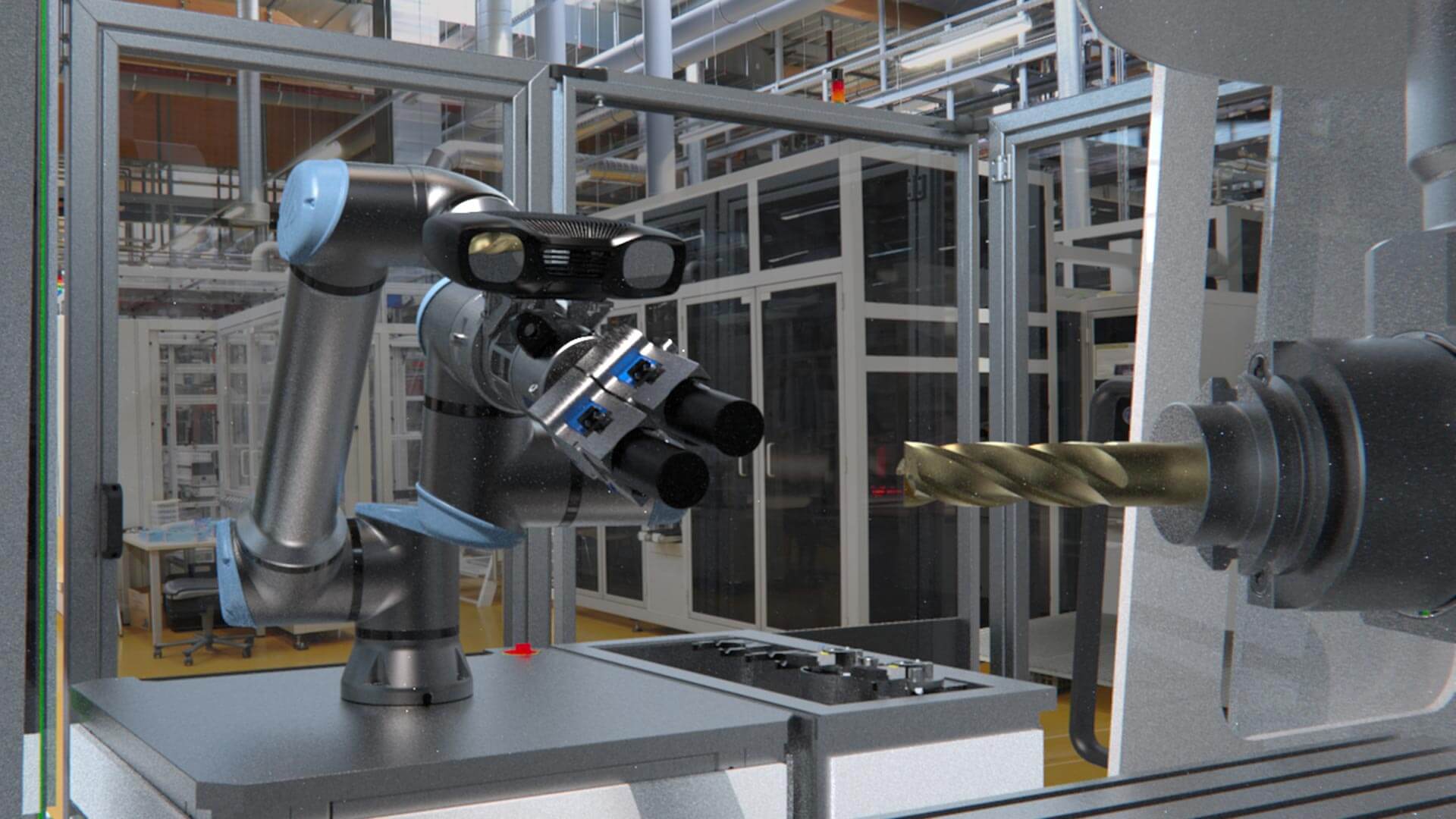
自动化机器辅助
先进的三维视觉系统使数控加工以及汽车、航空航天、医疗和其他零部件制造行业的机器辅助机器人单元功能更强大、更可靠。

正确的位置和方向
视觉引导机器人可执行精确的拾放任务,确保准确的放置和定位,同时避免碰撞和潜在的损坏。
捕捉任何材料

3D 视觉相机可捕捉高度详细、准确和完整的点云,即使是小型、反光或复杂的装配部件也不例外。
灵活的 3D 定位

从多个角度和视点捕捉物体,消除盲点,减少遮挡,并最大限度地减少点云伪影。
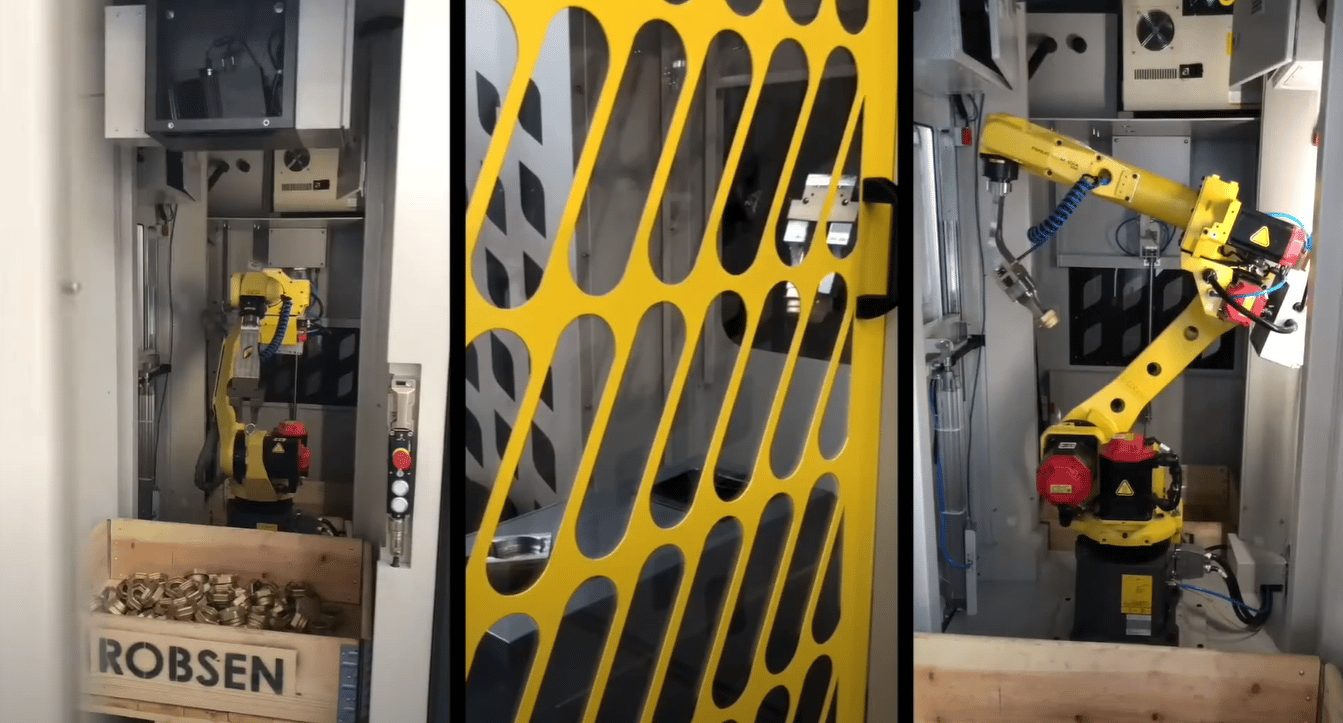
移动中的精度
精确的定位取决于准确的拾取,因此精度在机器操作任务中至关重要。即使拾取点出现轻微偏差,也会导致工件错位,从而导致机器装载不当或装配故障。这些错误的代价可能很高,需要额外的设备、工作空间和时间来纠正。
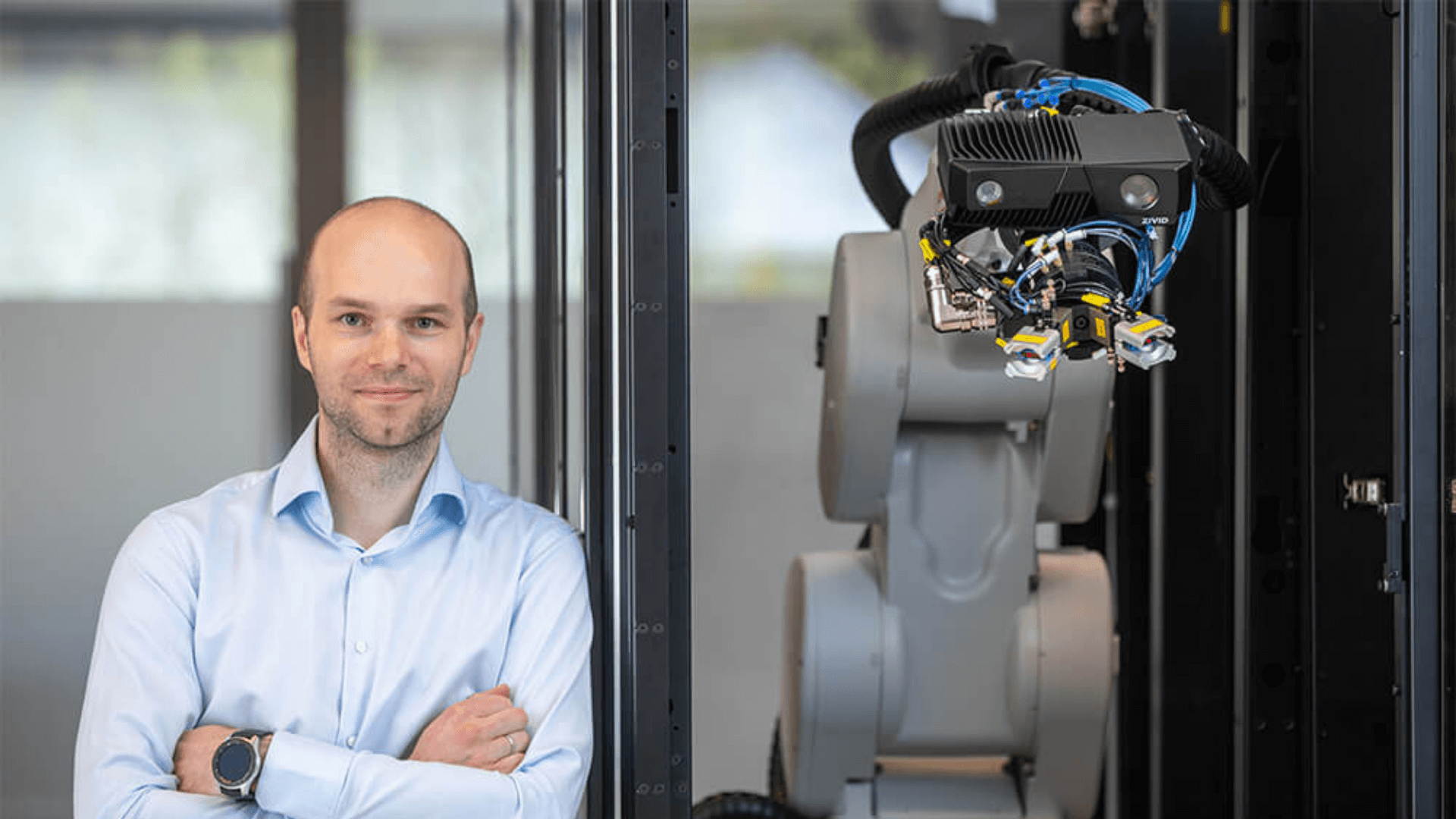
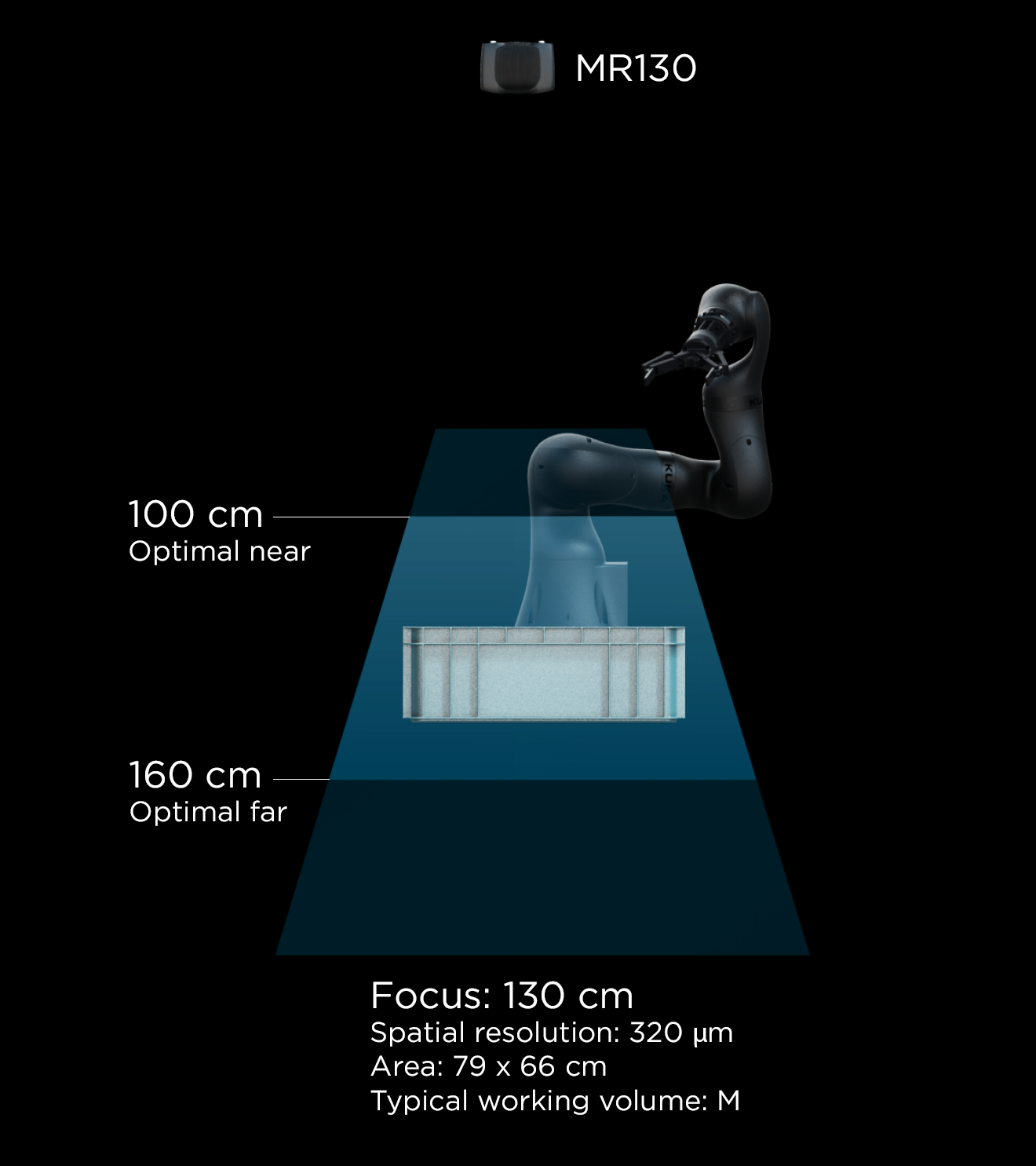
Zivid 3D 摄像头非常适合机器人安装应用,使机器人的视觉系统能够动态移动。这种移动性使相机能够从最佳角度和位置捕捉场景,确保可靠、精确的工件定位。
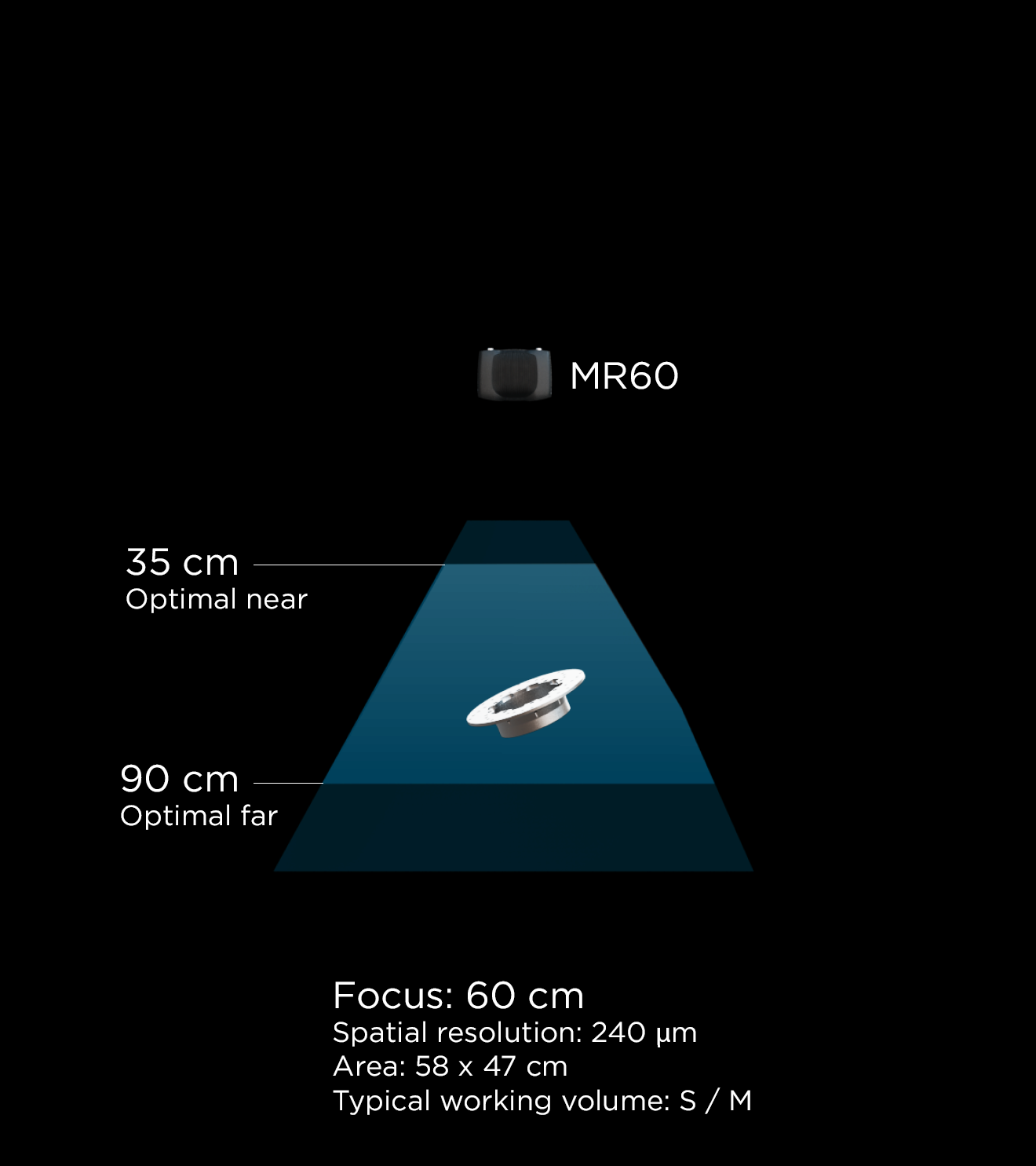
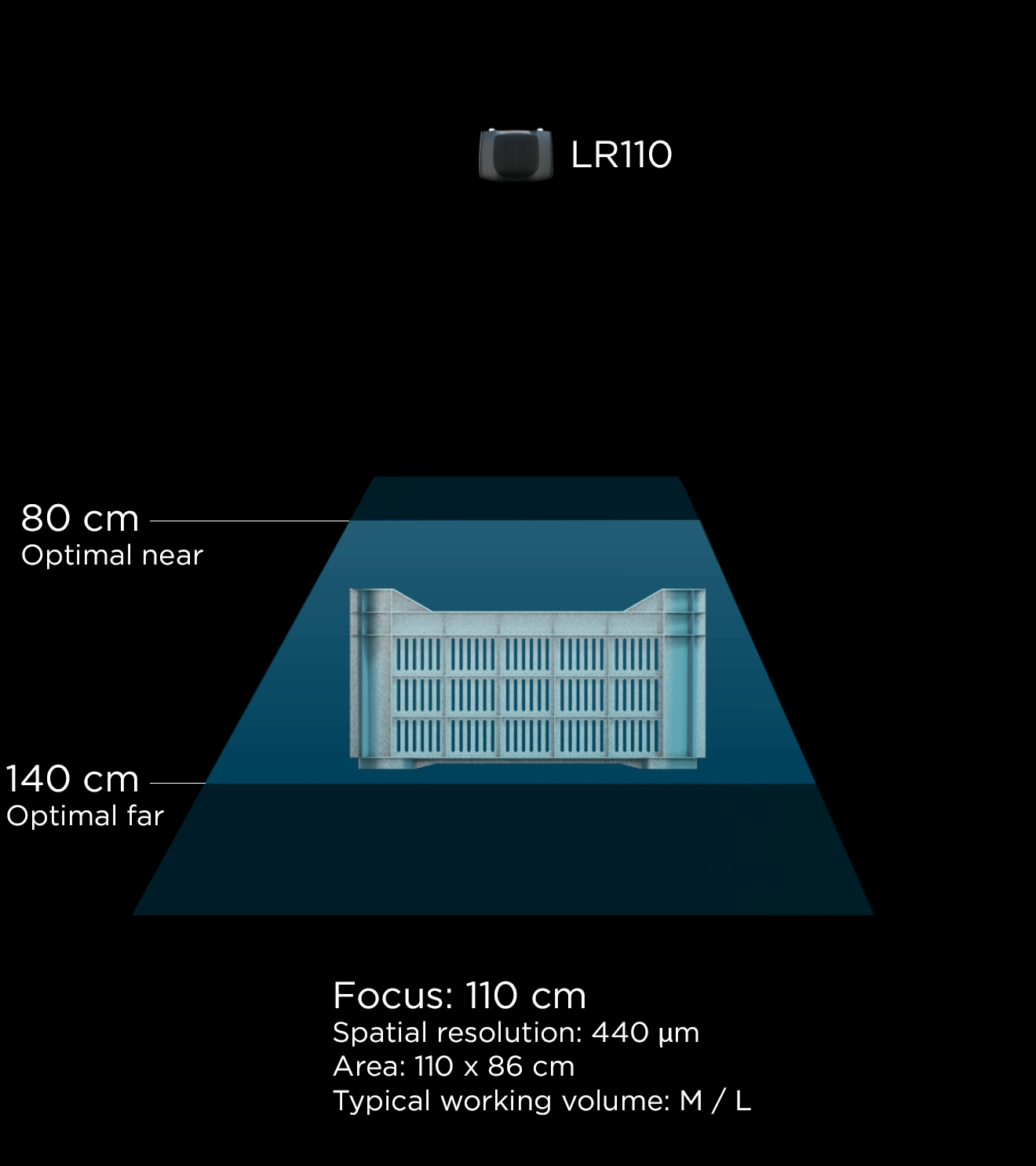
为什么 Zivid 三维相机是制造自动化的完美选择?
了解 Zivid 2+ R 系列三维热像仪如何为拣仓、装配、机器人引导和检测等制造任务带来高精度和多功能性。