로봇 가이드
제조 분야의 복잡한 표면 마감, 용접, 접착, 샌딩 작업을 위한 고급 로봇 안내.

모든 디테일을 캡처
작고 반사되는 복잡한 제조 부품의 경우에도 매우 상세하고 정확하며 완벽한 포인트 클라우드를 구현할 수 있습니다.
유연한 포지셔닝

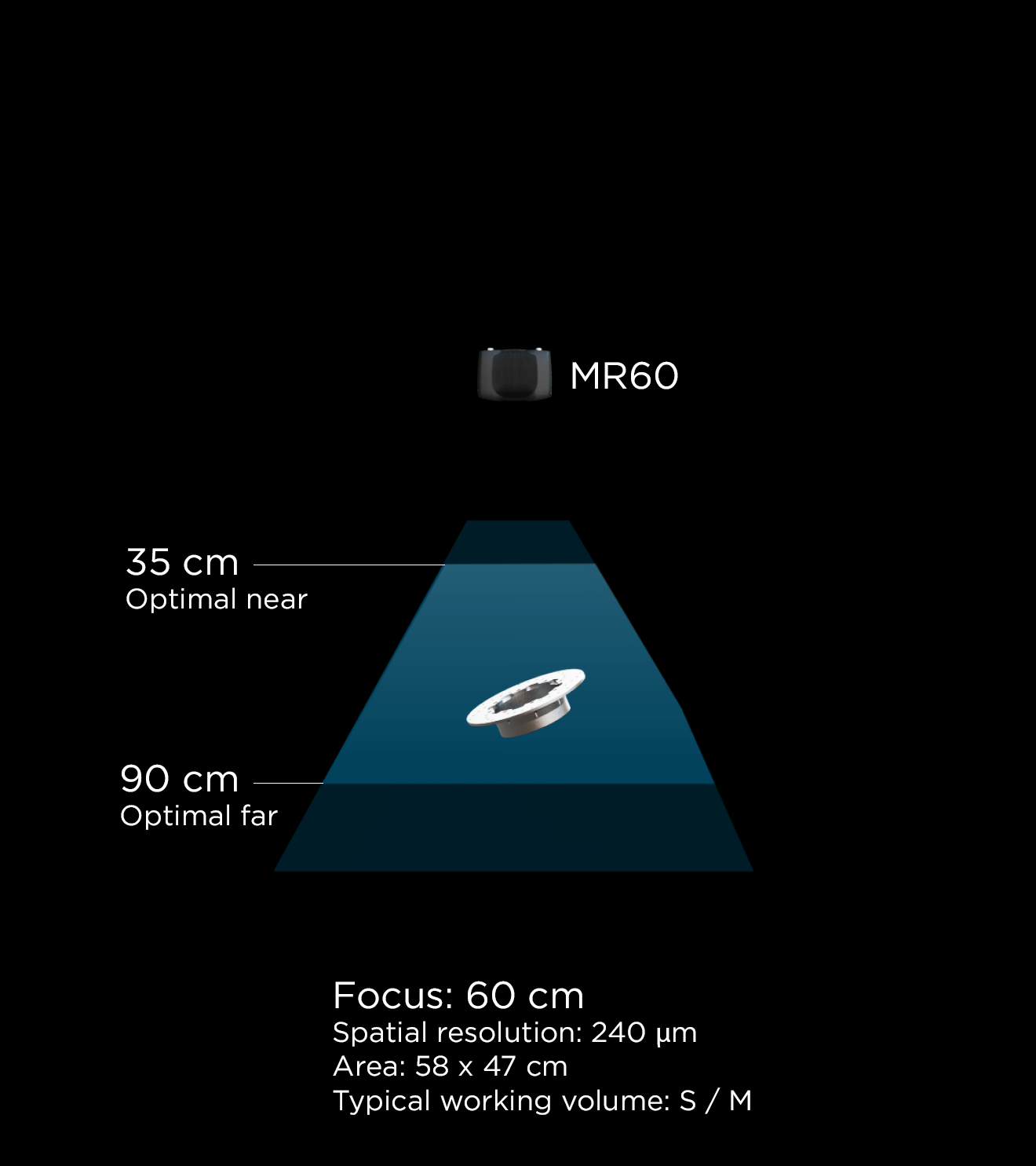
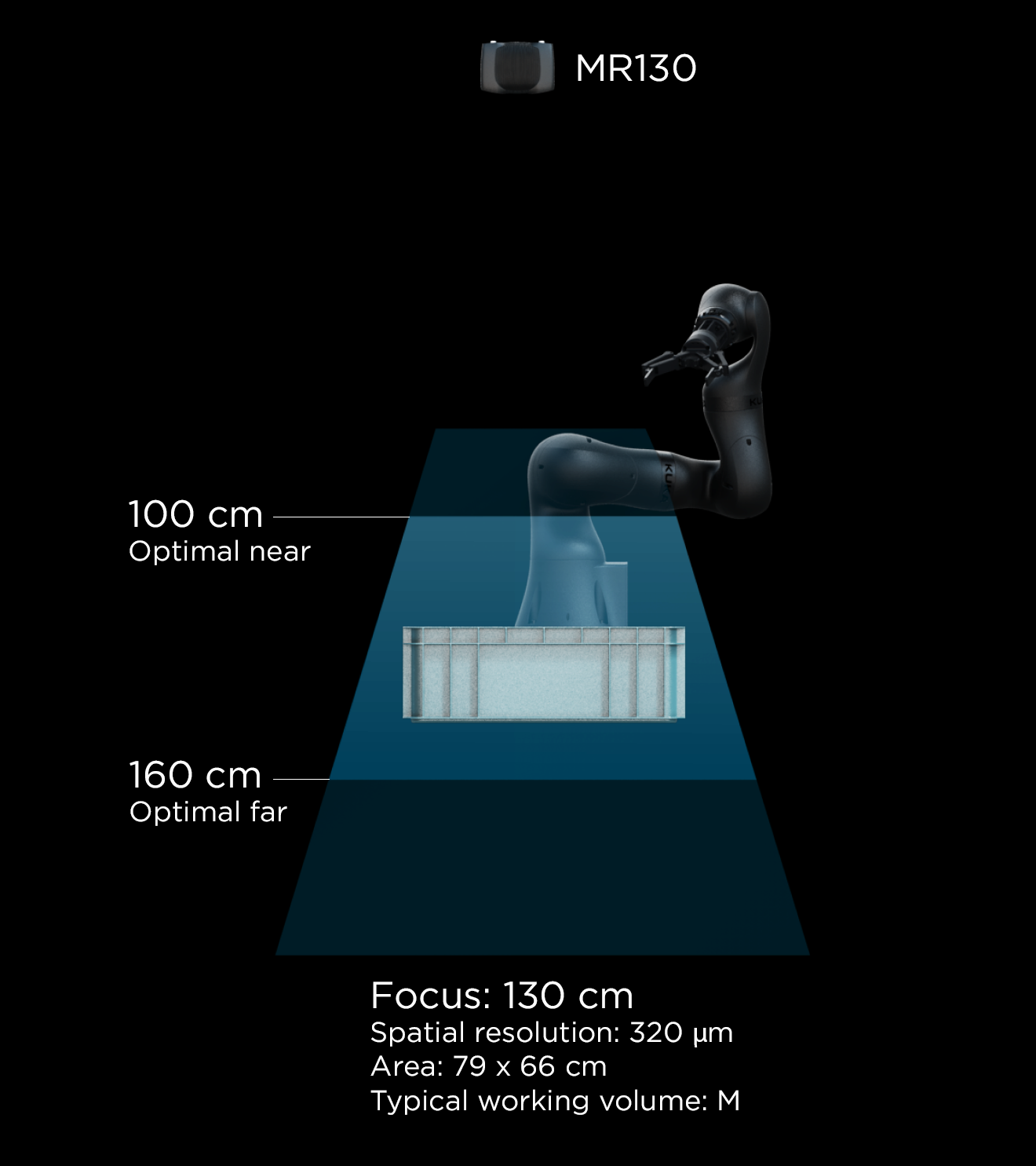
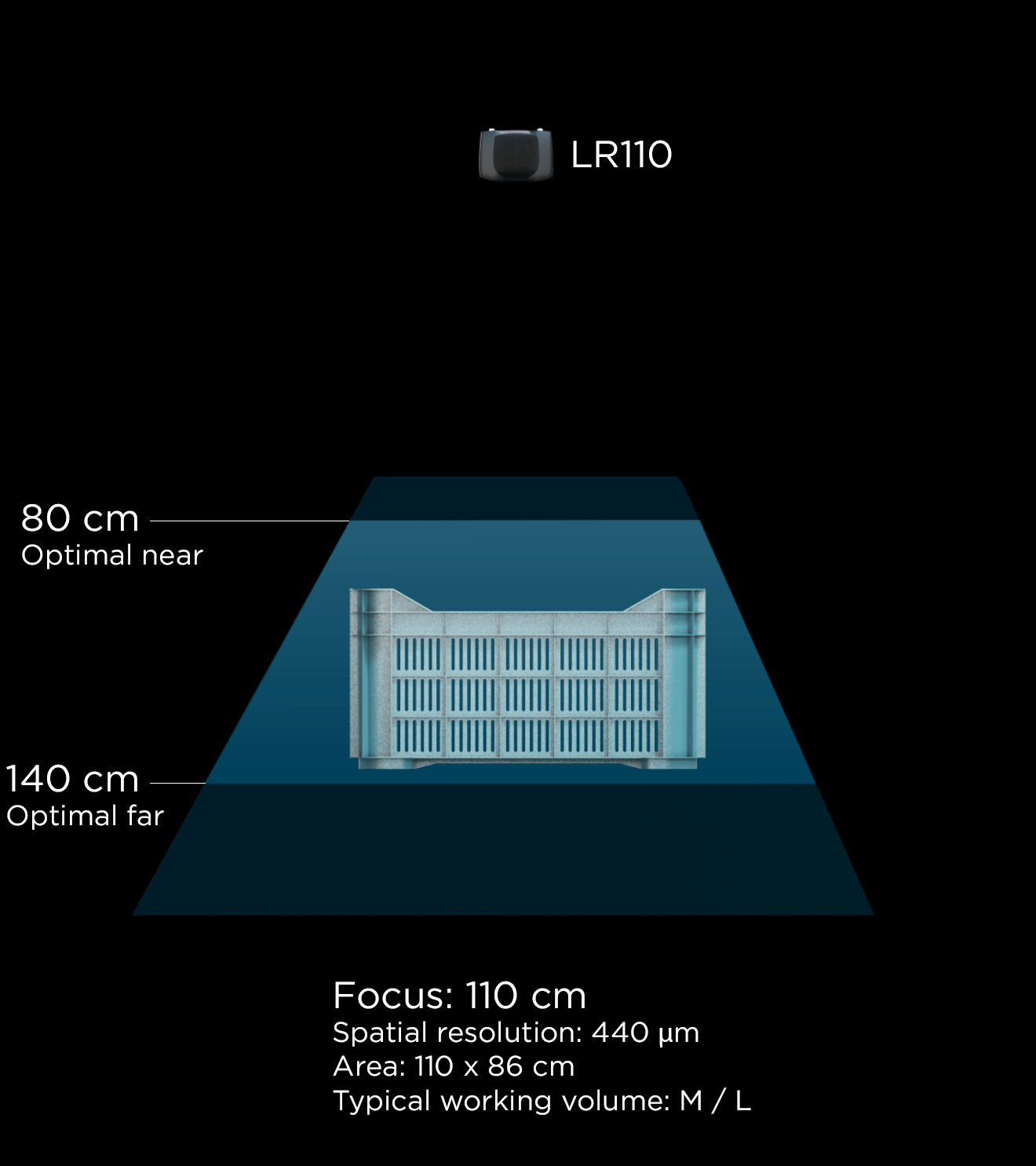
3D 카메라를 최적의 거리와 각도로 배치하면 캡처 품질이 향상되고 로봇이 여러 작업 공간에서 작동할 수 있습니다.
산업 환경에서의 신뢰성

산업용 등급 3D 비전 카메라는 고온, 입자 밀도가 높고 까다로운 환경에서도 일관된 성능을 제공합니다.
Zivid 3D 카메라가 제조 자동화에 완벽한 이유는 무엇일까요?
독일 출신의 애플리케이션 엔지니어가 Zivid 2+ R 시리즈 3D 카메라가 빈 피킹, 머신 텐딩, 조립 및 로봇 표면 마감과 같은 제조 작업에 어떻게 높은 정밀도와 다양한 기능을 제공하는지 알아보세요.

그레이매터 로보틱스 | AI 기반 로봇 표면 마감 처리

그레이매터 로보틱스 | AI 기반 로봇 표면 마감 처리
그레이매터는 Zivid 카메라를 AI 기반 로봇 셀에 통합하여 표면 마감 애플리케이션을 위한 정밀하고 정확한 컬러 3D 스캐닝을 구현했습니다.
Inbolt | 로봇 가이드를 위한 유연한 고정밀 솔루션
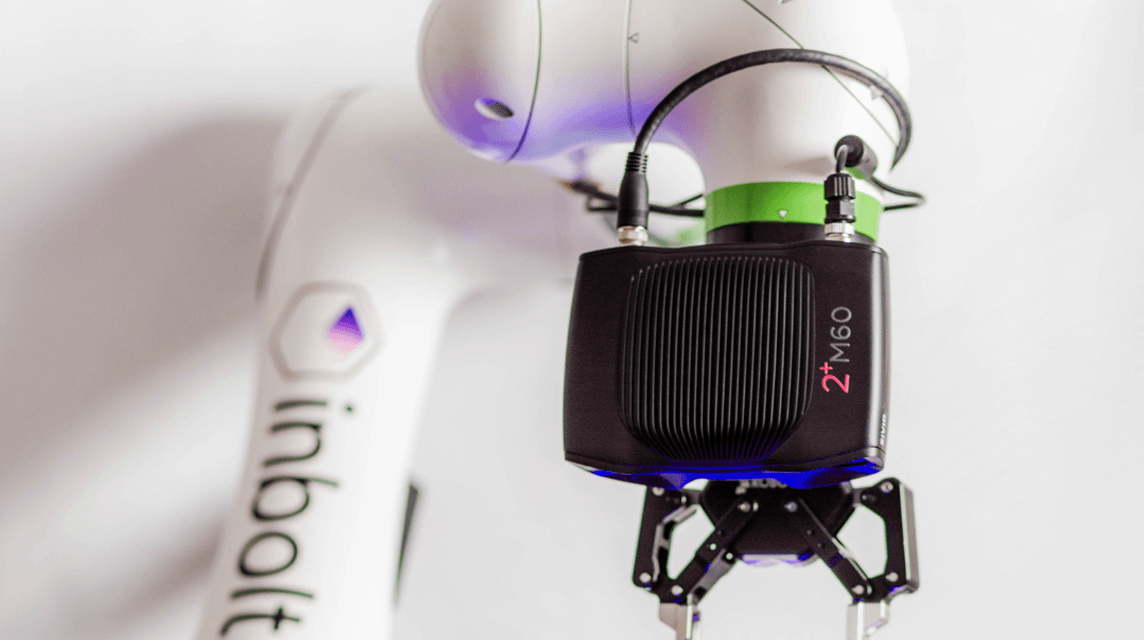
Inbolt | 로봇 가이드를 위한 유연한 고정밀 솔루션
GuideNOW는 놀라운 정밀도를 자랑하는 비전 기반 로봇 안내 솔루션입니다.
RAMLAB | 자동 용접 및 적층 제조 시스템
.jpg?width=1920&height=1080&name=ramlab_11zon%20(1).jpg)
RAMLAB | 자동 용접 및 적층 제조 시스템
램랩의 MaxQ 시스템은 로봇에 장착된 3D 비전으로 용접 및 적층 제조에 혁신을 가져왔습니다.