로봇 빈 피킹
조립, 머신 텐딩 및 부품 분류를 위한 제조 자동화

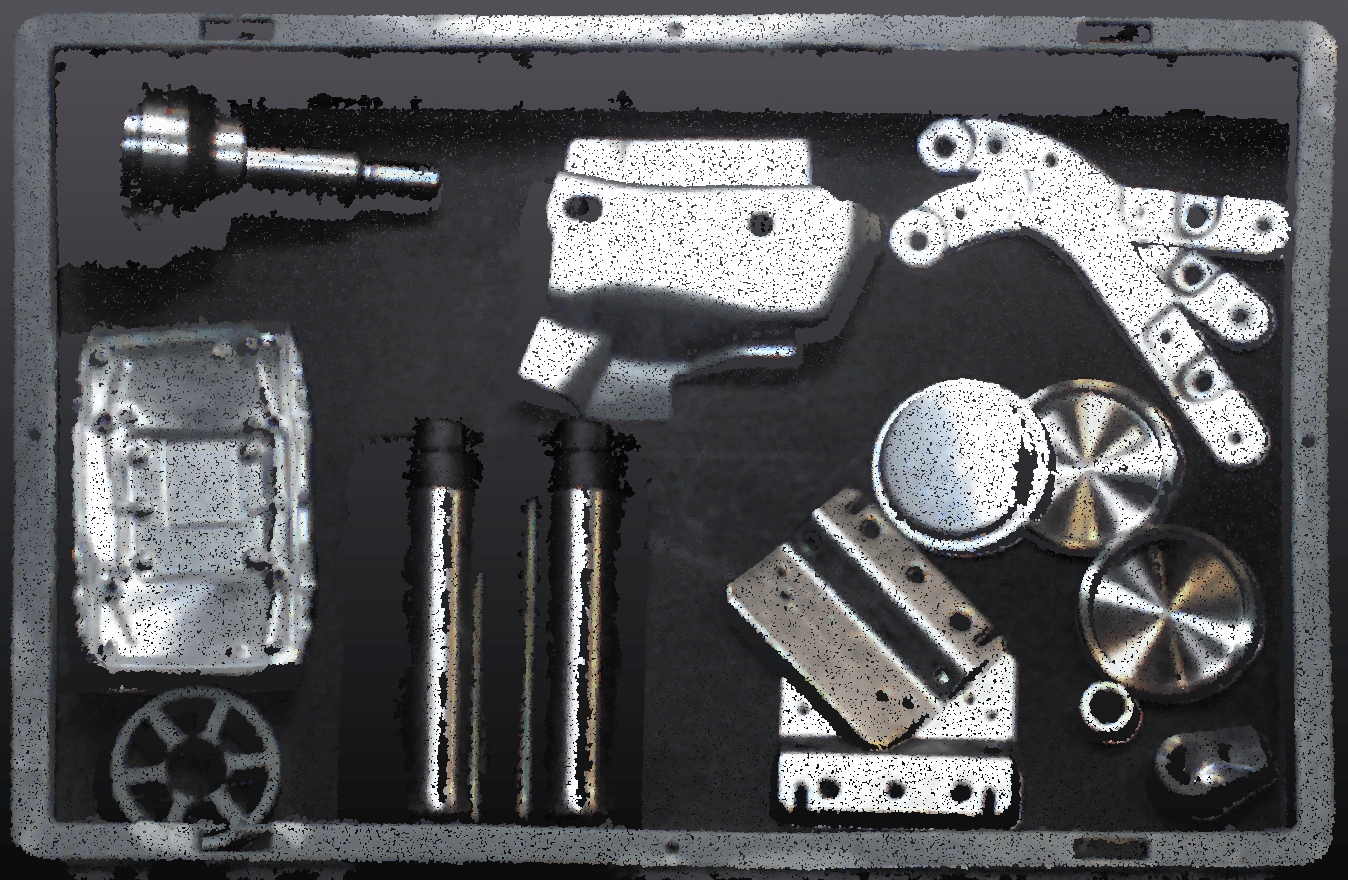
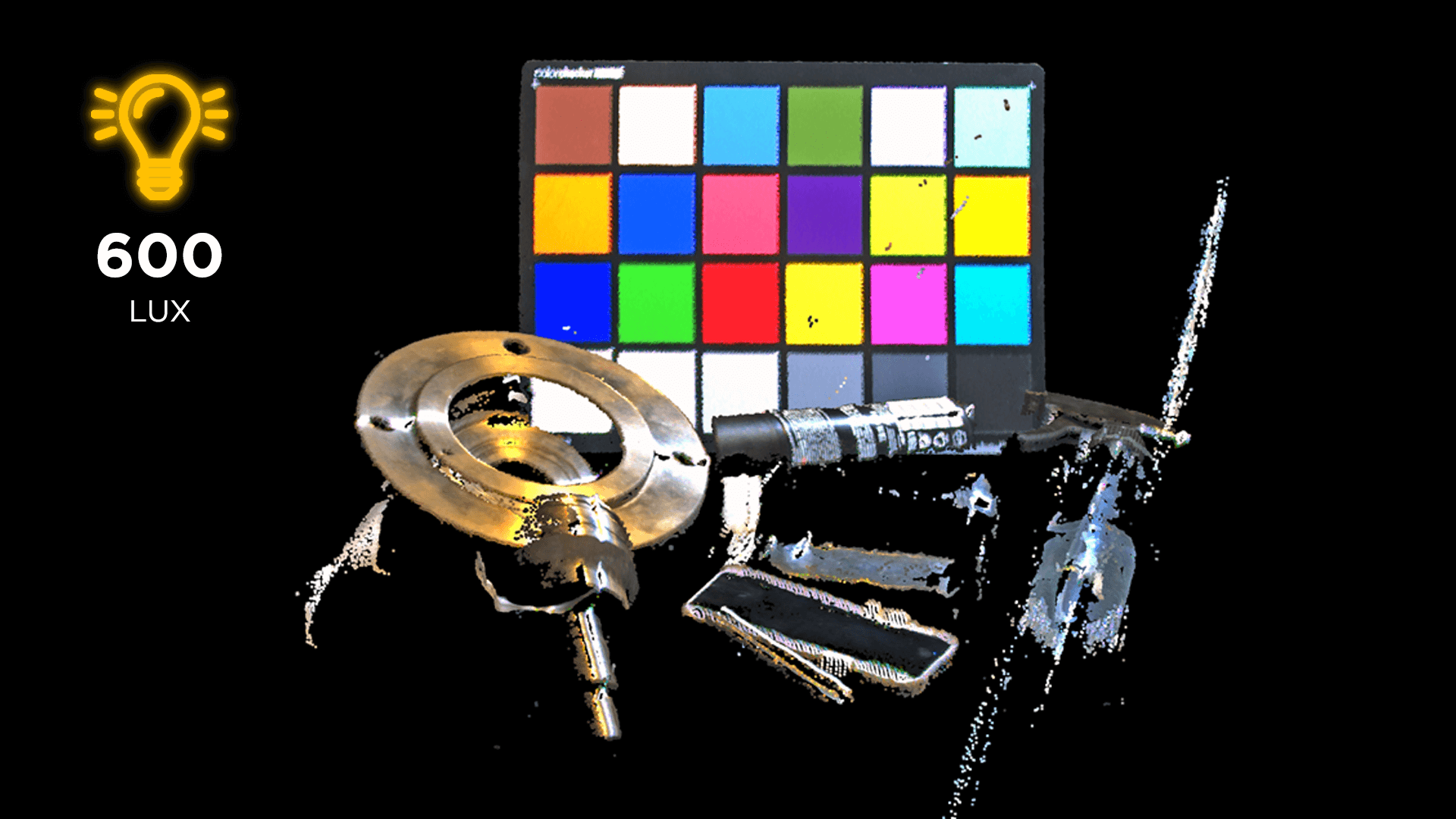
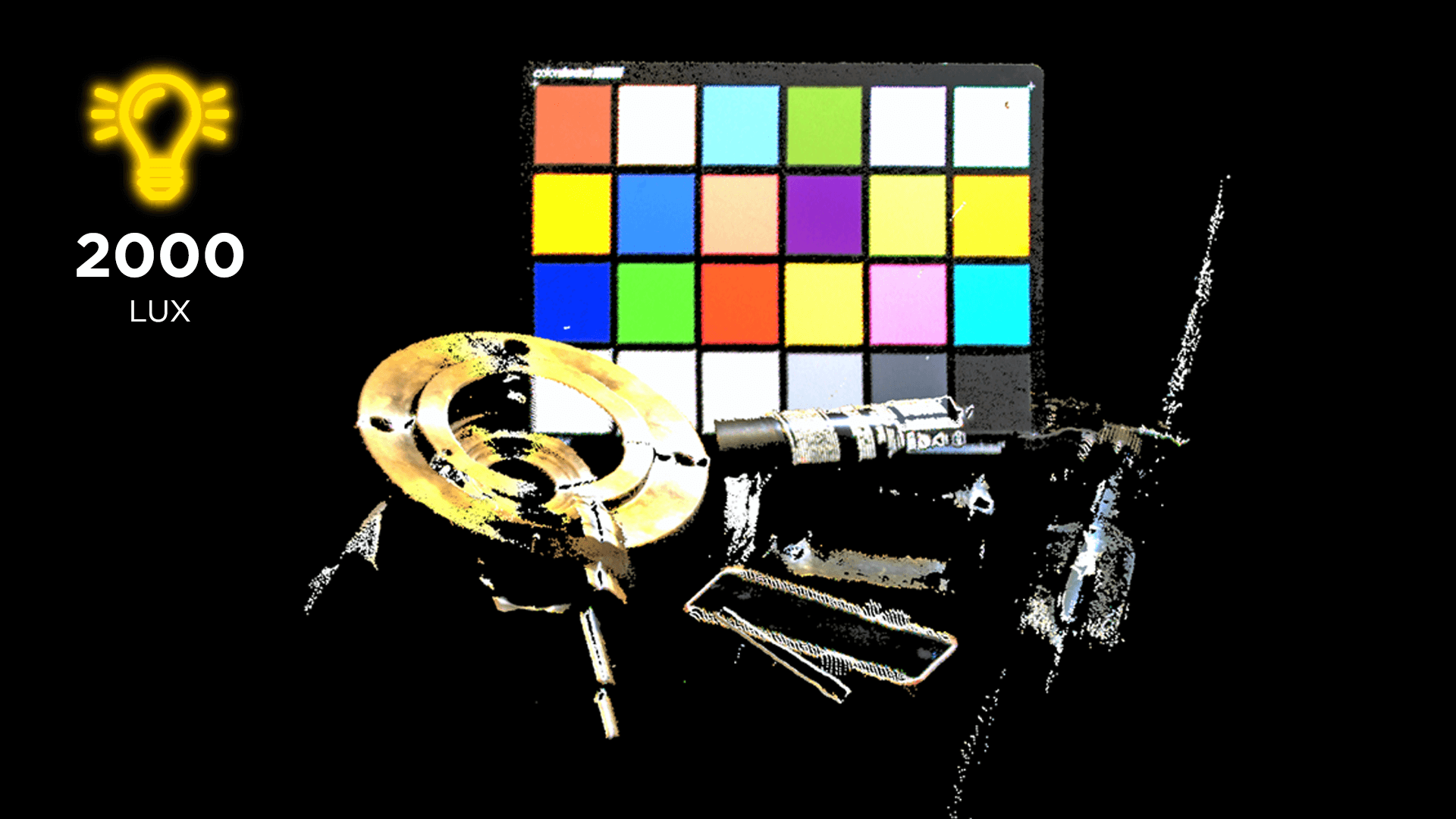
향상된 물체 인식
고해상도의 초정밀 기본 3D 포인트 클라우드를 통해 로봇은 물체 인식을 향상하고 더 많은 부품을 감지할 수 있습니다.
신뢰할 수 있는 3D 피킹 정확도
3D 비전은 물체의 크기, 방향, 절대 위치를 정확하게 캡처하여 안정적인 물체 경계를 인식할 수 있습니다.
올바른 배치 및 방향
비전 가이드 로봇은 정밀한 픽 앤 플레이스 작업을 수행하여 충돌과 손상을 피하면서 정확한 배치와 방향을 보장할 수 있습니다.
.png?hsLang=ko)





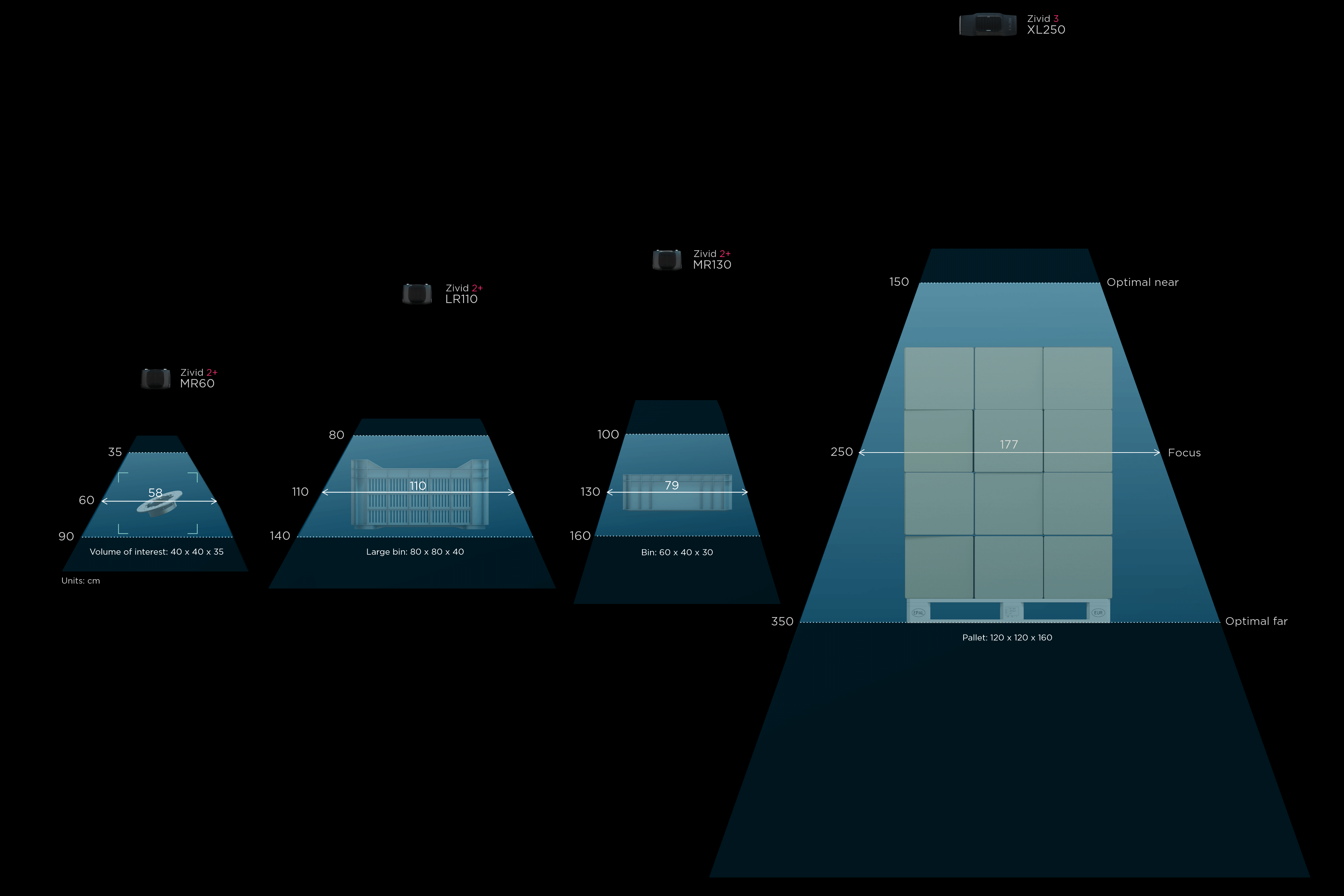
Zivid 3D 카메라가 제조 자동화에 완벽한 이유는 무엇일까요?
Zivid 2+ R 시리즈 3D 카메라가 빈 피킹, 머신 텐딩, 조립 및 로봇 표면 마감과 같은 제조 작업에 어떻게 높은 정밀도와 다양한 기능을 제공하는지 알아보세요.

ING 로보틱스의 제조용 올인원 3D 비전 솔루션
ING 로보틱스의 제조용 올인원 3D 비전 솔루션
ING 로보틱스는 정밀 조립 자동화를 위해 Zivid 2+ L110 3D를 결합한 3D 비전 솔루션인 ROBOEYE를 출시했습니다.
조립 라인을 위한 이노두라의 복잡한 부품 걸이 솔루션
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
조립 라인을 위한 이노두라의 복잡한 부품 걸이 솔루션
가공을 위해 부품을 매달아 놓는 작업은 주로 수작업으로 수행되어 왔으며, 이를 자동화하는 것은 정말 어려운 일이었습니다.
Plaif의 어플라이언스 제조 솔루션
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)
Plaif의 어플라이언스 제조 솔루션
Plaif는 AI와 3D 머신비전의 발전을 활용하여 가전 제품 제조에 고신뢰성 솔루션을 제공하고 있습니다.