自动化装配
拣取、放置、对齐与固定,实现高效制造自动化

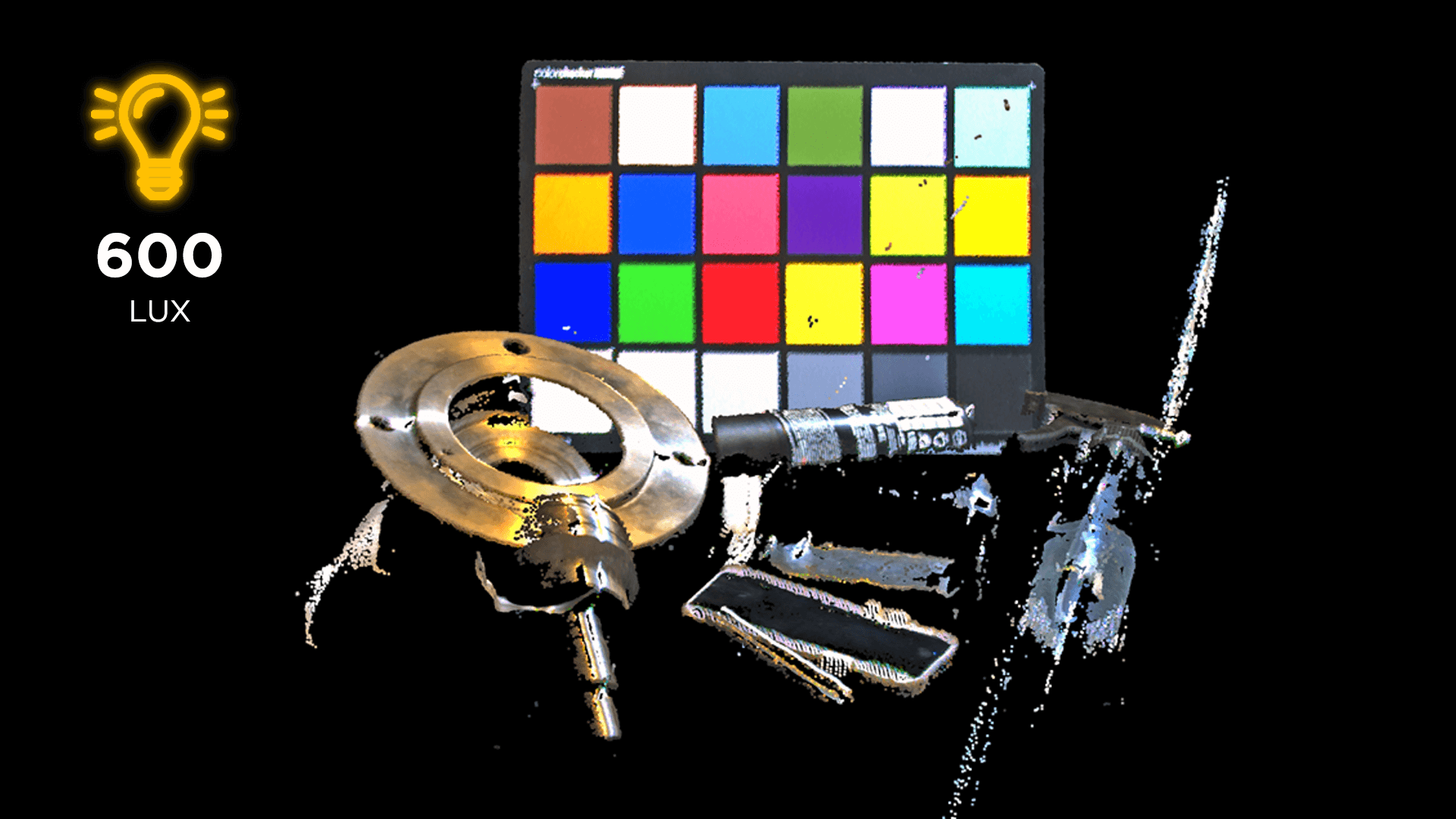
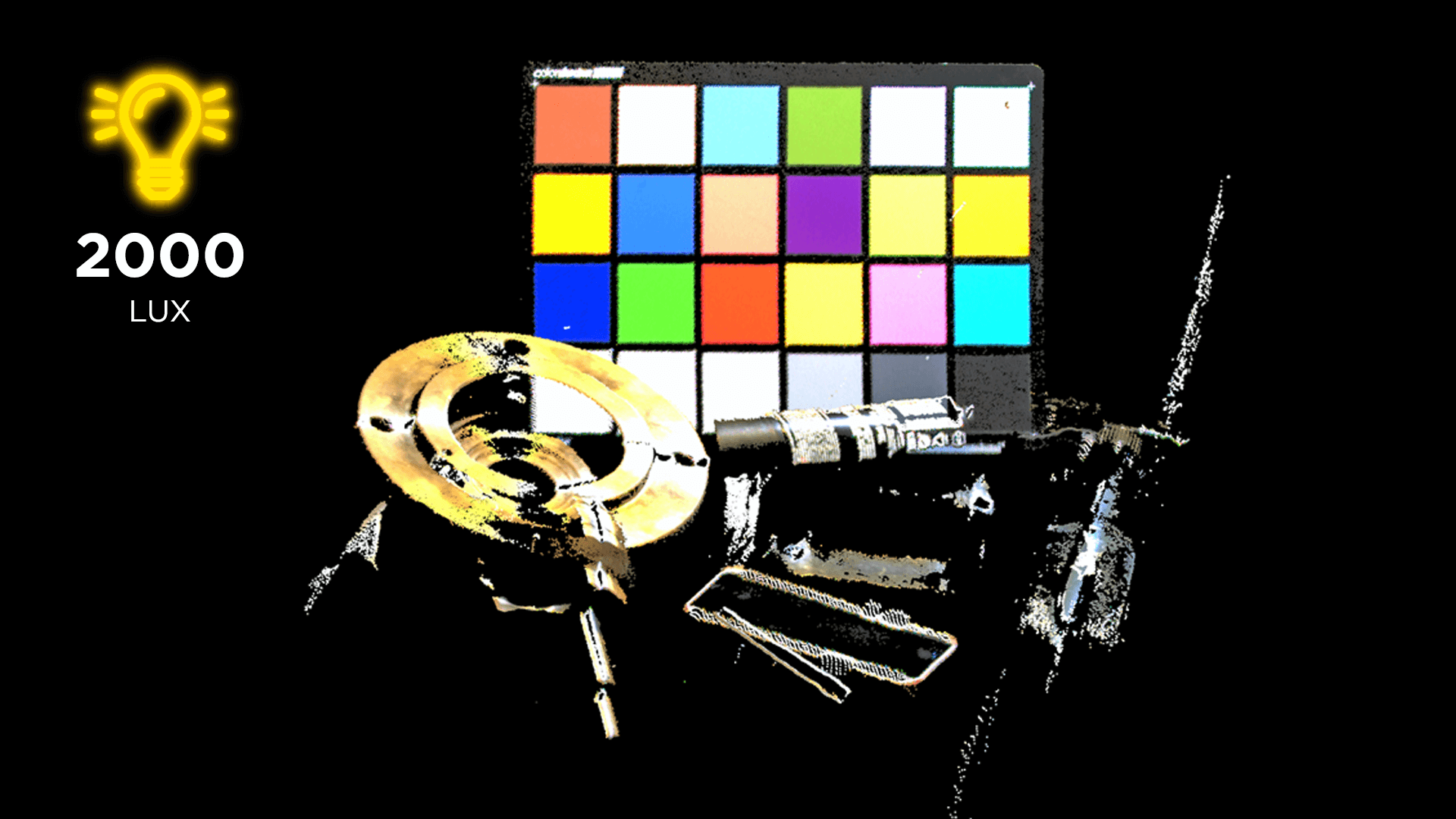
捕捉每一个细节
3D 视觉相机能够捕获高度精细、精准且完整的点云,即使是小型、反光或复杂的装配零件也能清晰成像。
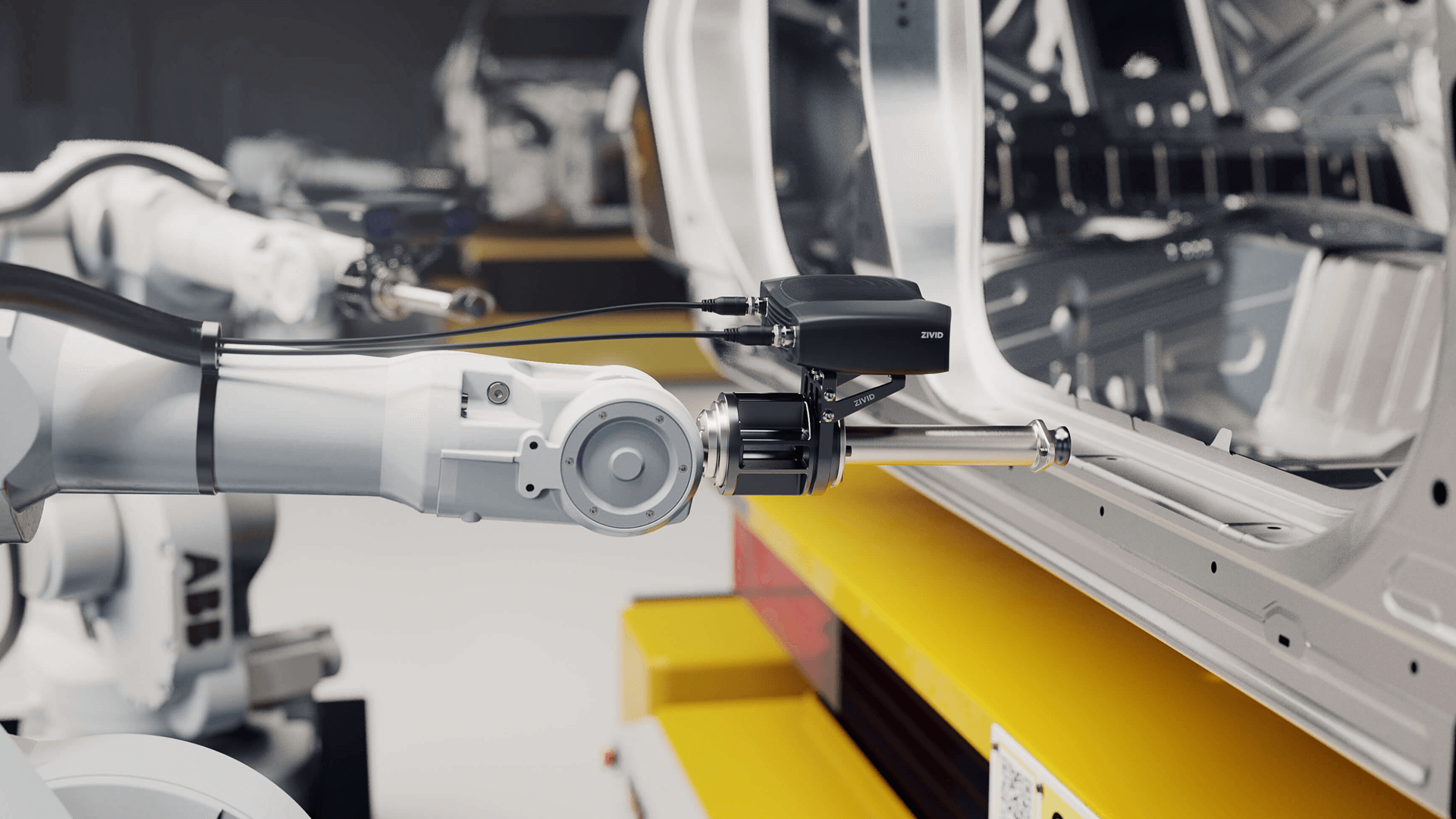
灵活的安装位置

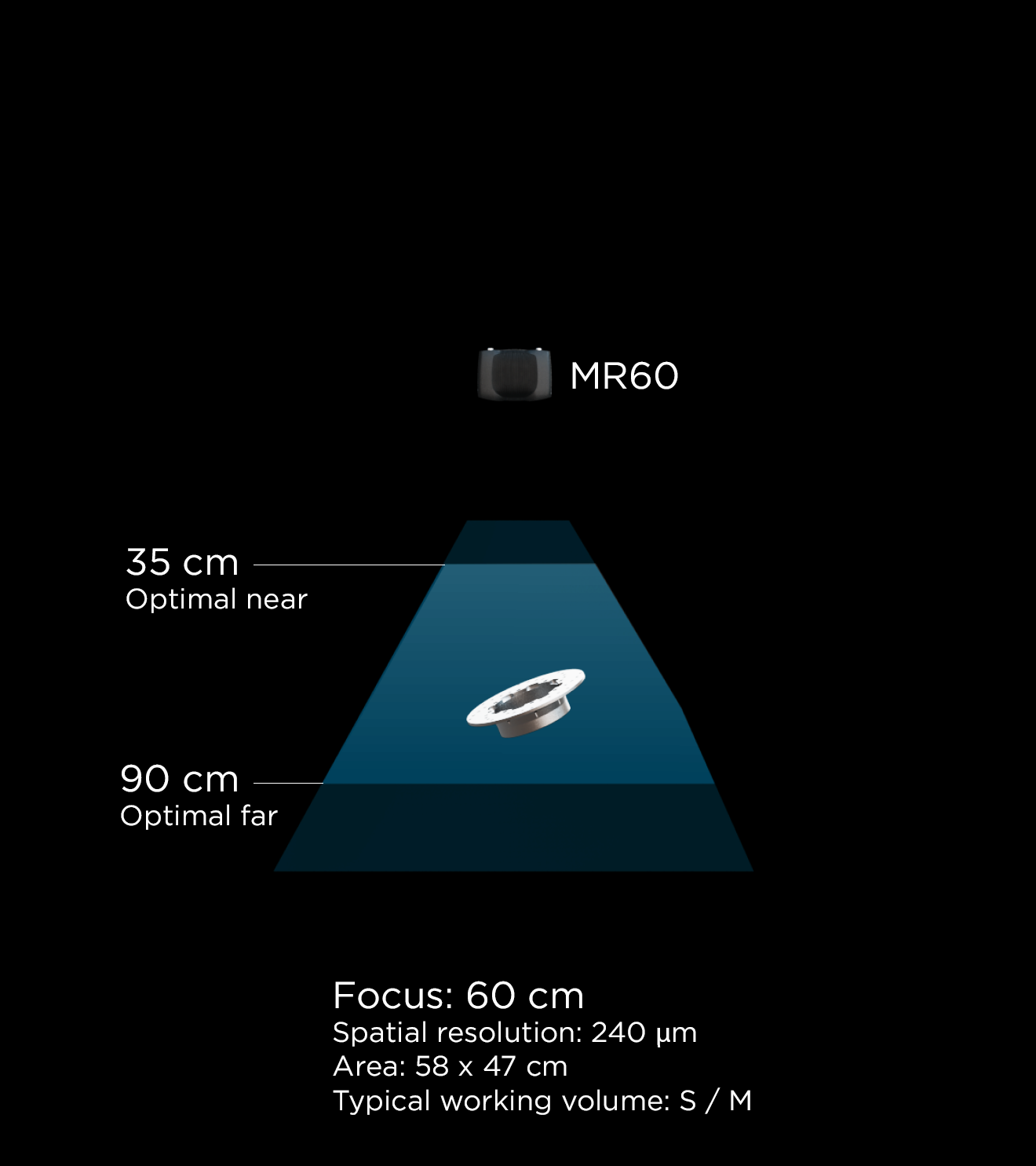
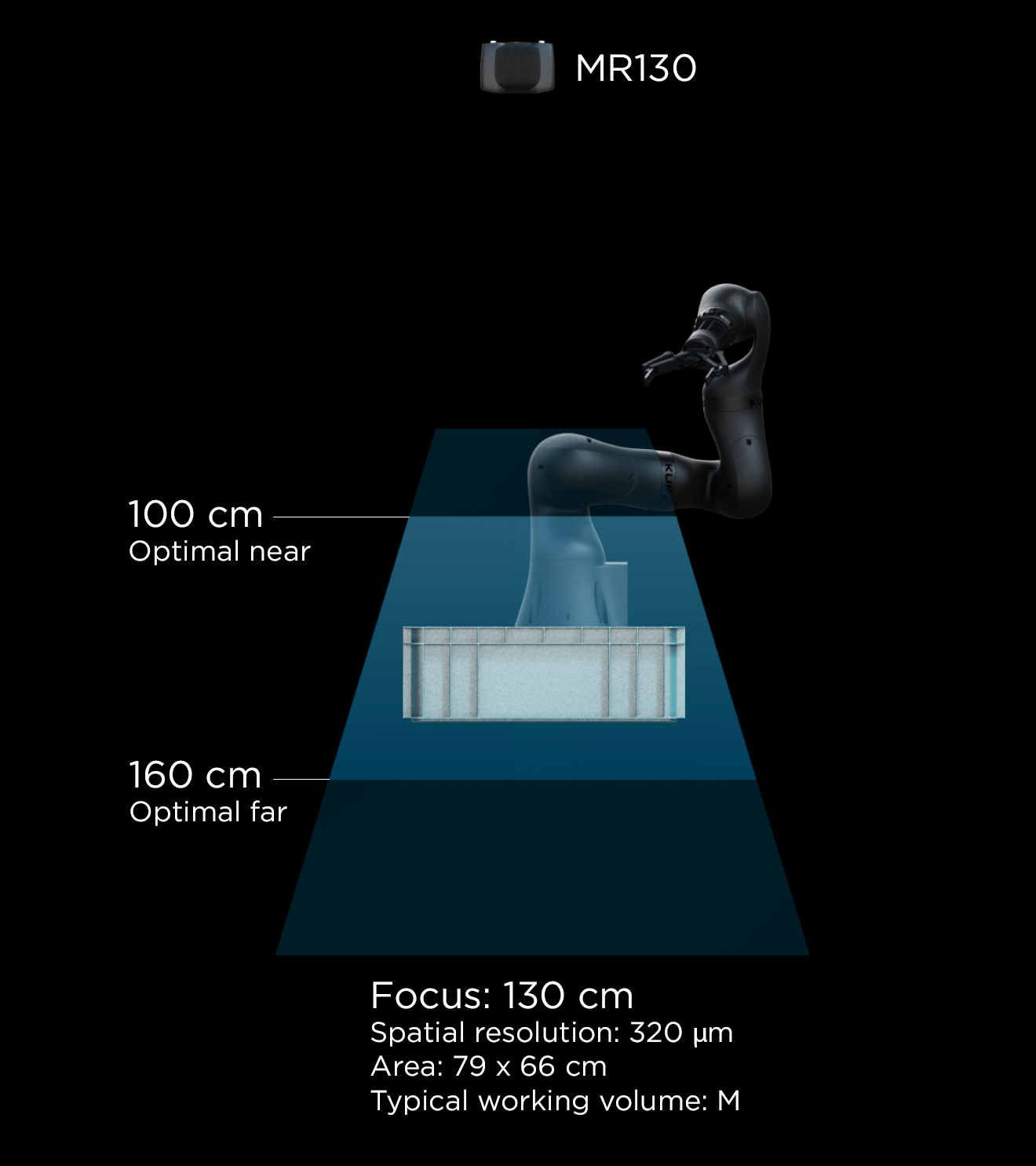
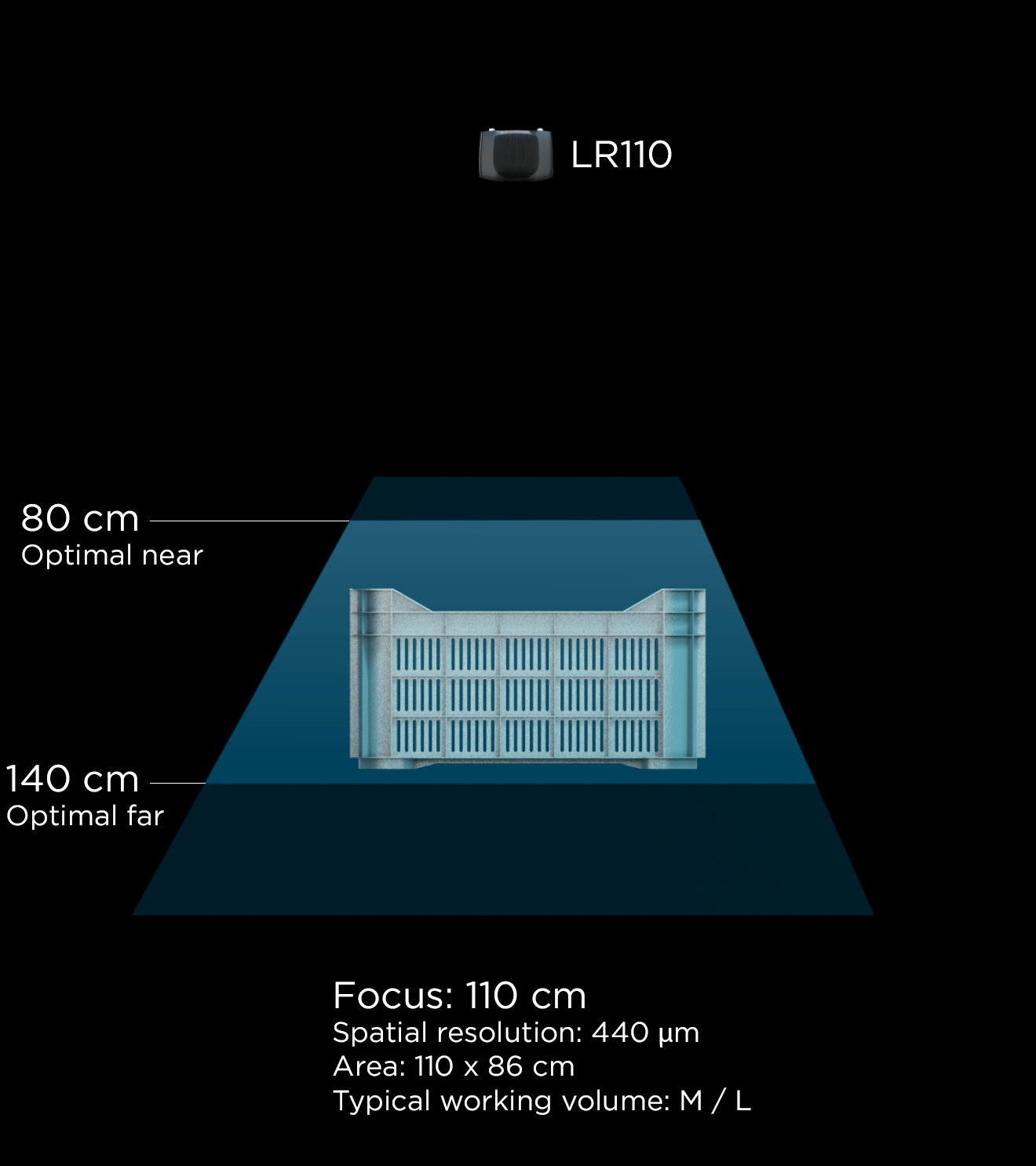
将 3D 相机放置在最佳距离与角度,可提升捕捉质量,并使机器人能够在多个工作空间中灵活作业。
工业环境下的可靠性

工业级 3D 视觉相机在演示单元和高要求的制造环境中都能保持一致的性能表现。
%20(1).png?hsLang=zh-hans)
.png?hsLang=zh-hans)




为什么 Zivid 3D 相机是制造自动化的理想选择?
我们的应用工程师 German 发现,Zivid 2+ R 系列 3D 相机在料箱拣选、机床上下料、装配以及机器人表面处理等制造任务中,能够带来高精度与高灵活性。
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)