
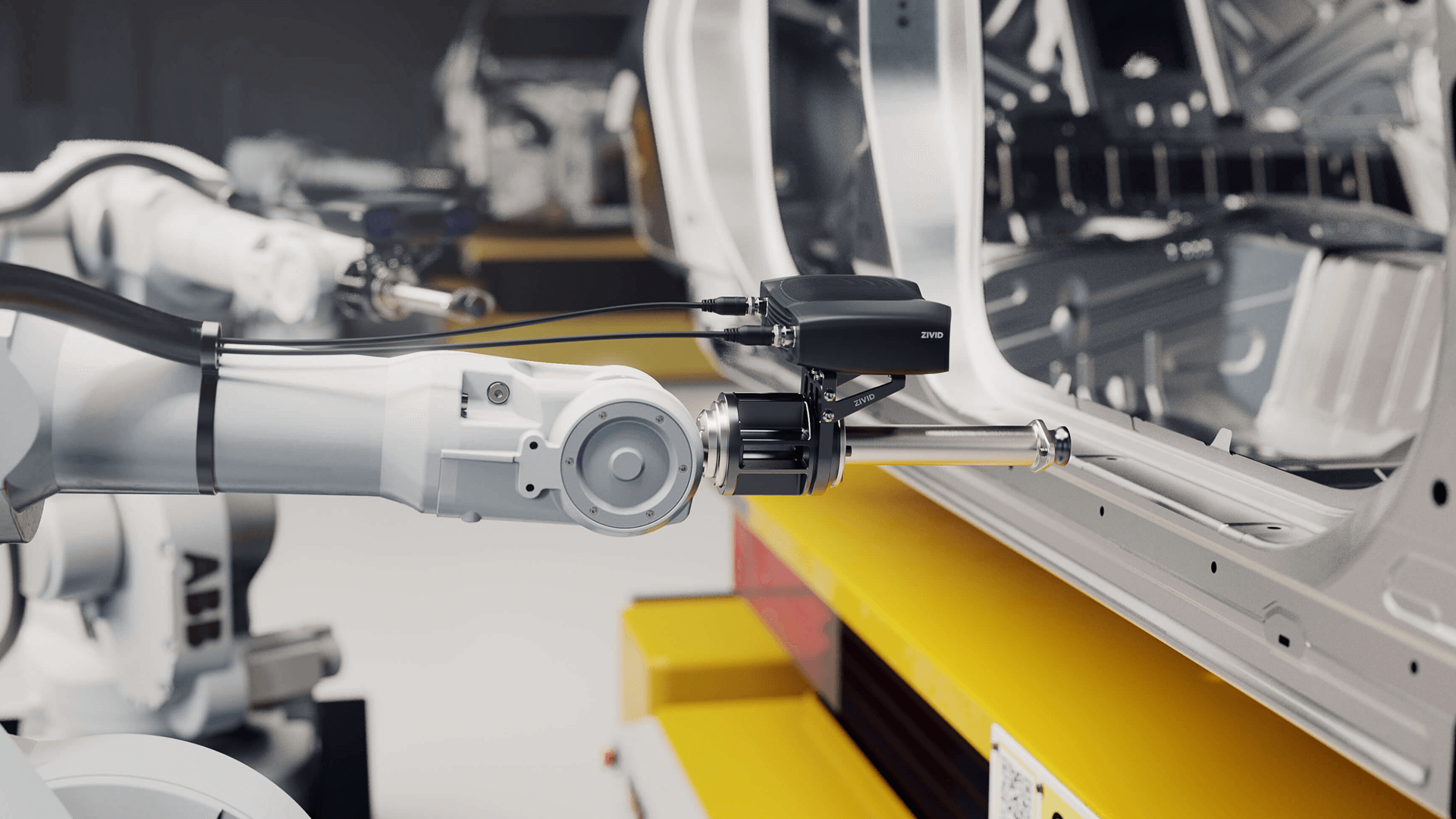
自動組立
効率的な製造自動化のためのピック、プレース、アライン、ファスナー

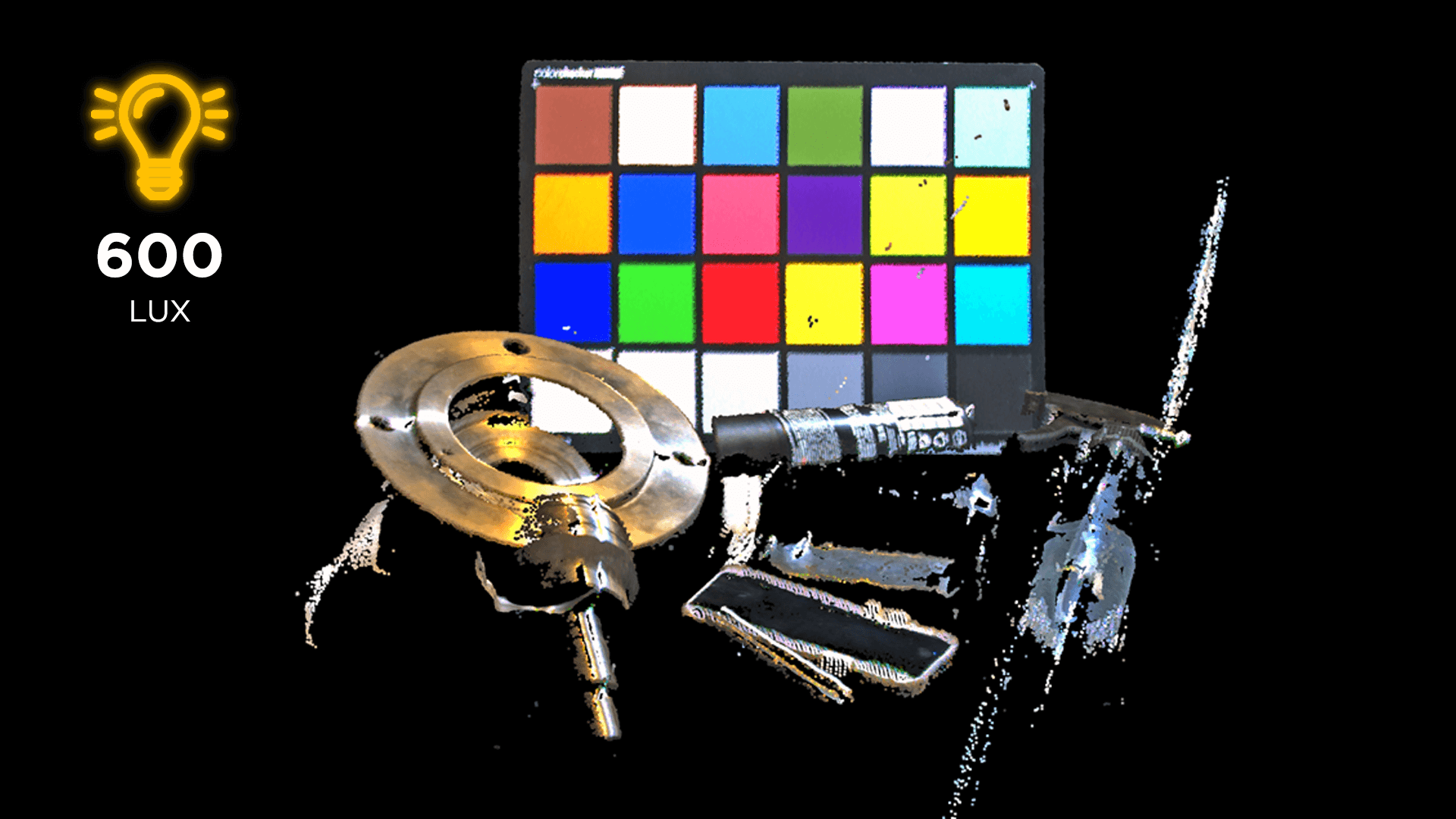
細部までとらえる
3Dビジョンカメラは、小さく、反射しやすく、複雑な組立部品であっても、非常に詳細で、正確で、完全な点群をキャプチャします。
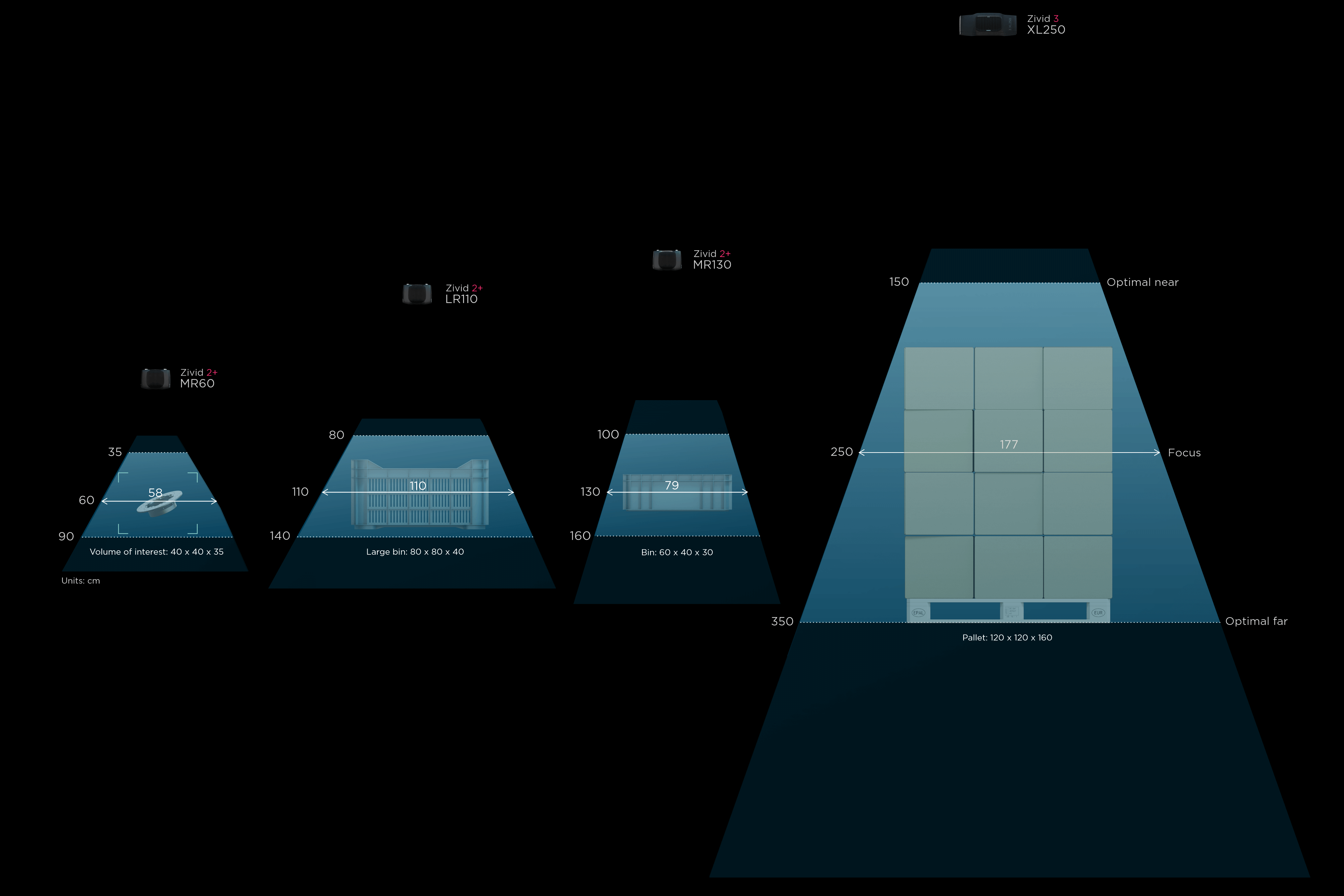
柔軟なポジショニング

3Dカメラを最適な距離と角度に配置することで、キャプチャの品質が向上し、ロボットが複数の作業スペースで動作できるようになります。
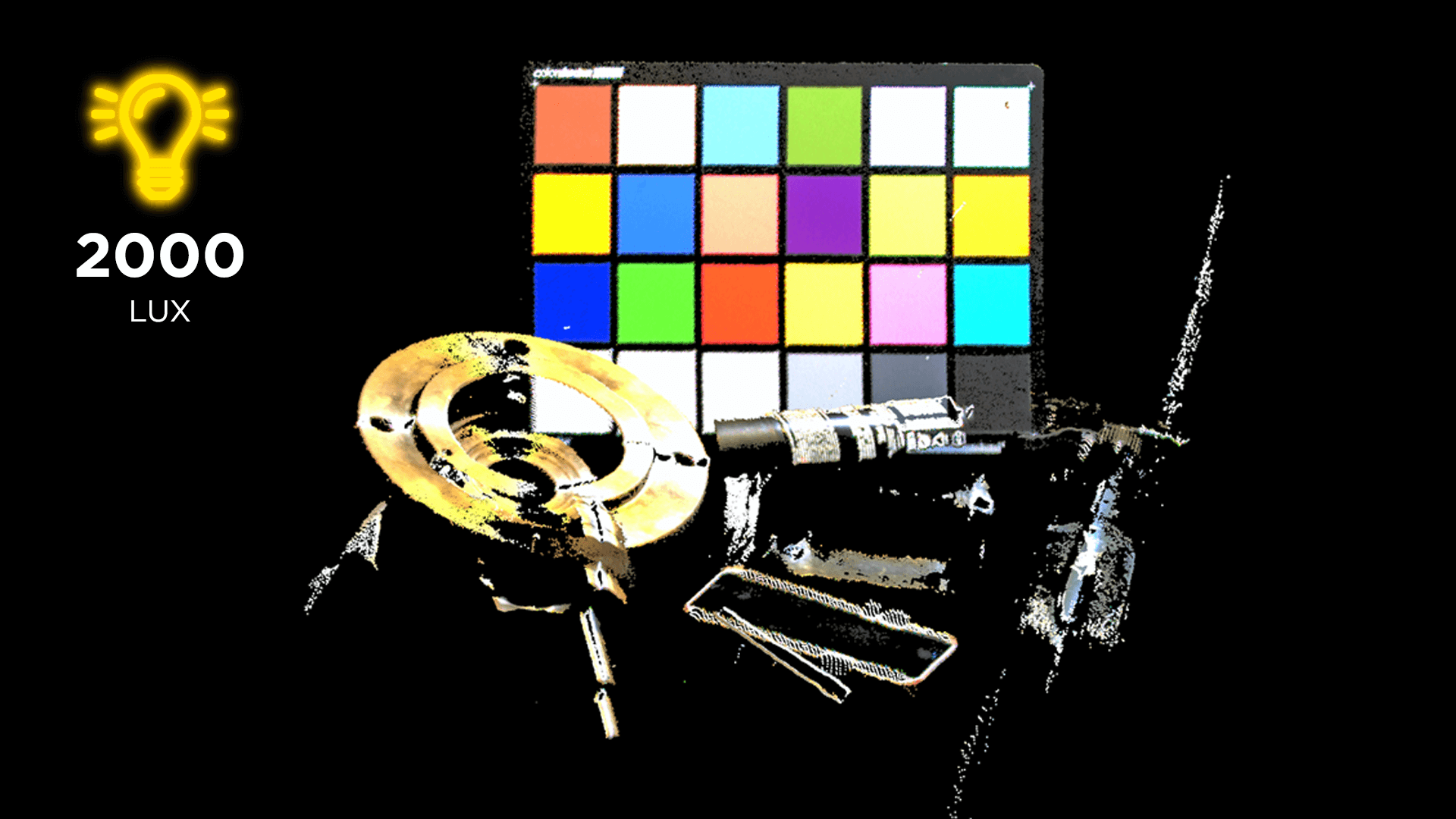
産業環境での信頼性

工業用3Dビジョンカメラは、デモセルでも厳しい製造現場でも安定した性能を発揮します。
%20(1).png?hsLang=ja)
.png?hsLang=ja)




Zivid 3Dカメラが製造自動化に最適な理由
当社のアプリケーションエンジニア、ジャーマンが、Zivid 2+ Rシリーズ3Dカメラが、ビンピッキング、マシンテンディング、アセンブリ、ロボット表面仕上げなどの製造タスクに高精度と汎用性をどのようにもたらすかをご紹介します。
-2-2.webp?width=1144&height=640&name=Untitled%20(1144%20%C3%97%20614px)-2-2.webp)
-1.webp?width=1920&height=1080&name=Scenario%20Automated%20Assembly%20with%20Zivid%20Two%203D%20camera%20-%20White%20Goods%20(1)-1.webp)