
自動組み立てでは、通常、すべてのオブジェクト、位置、フィクスチャが固定されている必要があります。3Dビジョン誘導ロボット組み立てシステムを使えば、システム全体の柔軟性を向上させることができます。Zivid 2 3Dカメラは、業界随一の信頼性 を実現し、エラー率は0.2%未満。オブジェクトの変動に対するより高い許容誤差と、対象オブジェクトの正常な検出、正確なピッキング、正しい位置で組み立てを可能にします。
組み立てを自動化するには、安定性、信頼性、速度が必要です。典型的なアプローチには、プロセスに追加される手順のために対象部品が一貫して確実に提示されるように、機械的な仕分けまたはフィクスチャによる部品の単一化が含まれます。
深度センサーと3Dビジョンセンサーを導入する場合の目的は、組み立て段階の柔軟性を高めながら、非常に特殊な機械や1回限りのコンポーネントの必要性を減らすことです。

3Dビジョン誘導ロボット組み立てラインの場合、3Dカメラは、さまざまな絡み合い、重なり合い、ランダムに配置されたオブジェクトをしっかり検出できるようにする必要があります。ビジョンシステムは、光沢があったり反射したりする対象部品や商品を処理するときにも優れた機能を備えている必要があります。
Zividが設計する産業用3Dカメラは、検出、ピッキング、配置の卓越したパフォーマンスを備えたシステムの開発を支援します。Zivid Twoと、3Dビジョン誘導自動組み立てを可能にする主な機能について詳しくは、こちらをご覧ください。



白物家電の組み立てにZivid Two 3Dカメラを使用。
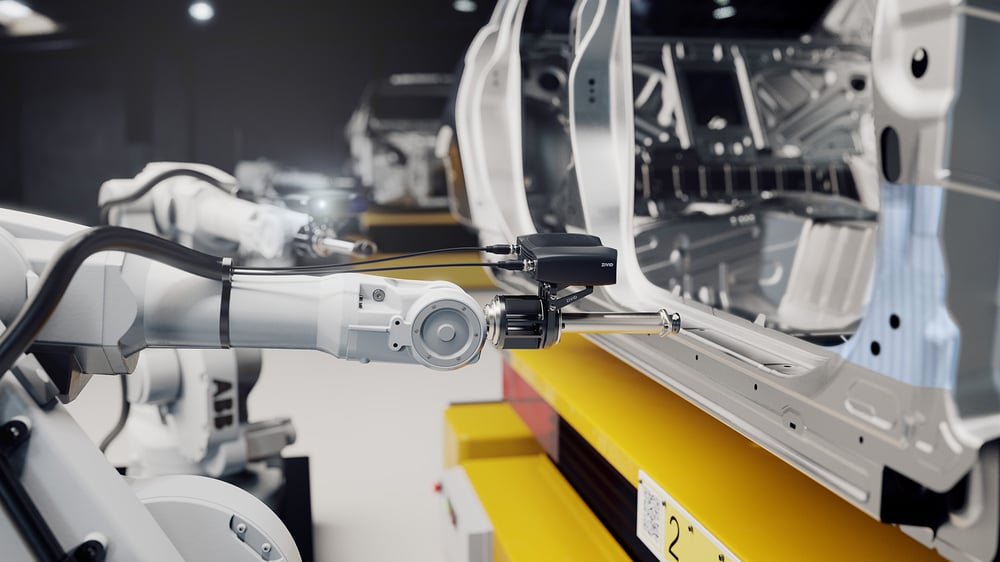
自動車ロボット組み立てと検査におけるZivid Two 3Dカメラ。

Zivid brings
Gjerdrums
N-0484, Oslo
Norway





